|
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
#include <Mesh.H>
Protected Attributes | |
| IndexType | _size |
|
inline |
| GeoPrim::C3Point Centroid | ( | ) |
| void Centroid | ( | std::vector< IndexType > & | ec, |
| NodalCoordinates & | nc, | ||
| GeoPrim::C3Point & | centroid | ||
| ) | const |
Definition at line 1463 of file Mesh.C.
References i, and C3Vector::Init().

| GeoPrim::C3Point Centroid | ( | std::vector< IndexType > & | ec, |
| NodalCoordinates & | nc | ||
| ) | const |
| void dshape_func | ( | const GeoPrim::CVector & | nc, |
| double | dSF[][3] | ||
| ) | const |
Definition at line 962 of file Mesh.C.
References _size, CVector::x(), CVector::y(), and CVector::z().
| void get_face_connectivities | ( | Connectivity & | rv, |
| const std::vector< IndexType > & | e | ||
| ) | const |
Face conn for given element.
Tet Faces: 132 241 342 143 Pyr Faces: 1432 251 352 453 154 Prism Faces: 2541 3652 1463 132 456 Hex Faces: 1432 2651 3762 4873 1584 5678.
Returns a vector of lists where each list is the face connectivity for the i'th face of the element, and i is the index into the vector. This function was created as a utility for building overarching face containers for the whole mesh (on this processor).
Hex Faces: 1432 2651 3762 4873 1584 5678
Definition at line 1714 of file Mesh.C.
References _size, and Mesh::Connectivity::Resize().
Referenced by Mesh::Connectivity::BuildFaceConnectivity().


| void interpolate | ( | const GeoPrim::CVector | f[], |
| const GeoPrim::CVector & | nc, | ||
| GeoPrim::CVector & | v | ||
| ) | const |
Definition at line 1066 of file Mesh.C.
References _size, CVector::x(), CVector::y(), and CVector::z().
| bool Inverted | ( | std::vector< IndexType > & | ec, |
| NodalCoordinates & | nc | ||
| ) | const |
Definition at line 1475 of file Mesh.C.
References _size, Centroid(), C3Facet::Centroid(), C3Facet::Normal(), and p1.
Referenced by main().
| void jacobian | ( | const GeoPrim::CPoint | p[], |
| const GeoPrim::CVector & | nc, | ||
| GeoPrim::CVector | J[] | ||
| ) | const |
Definition at line 1016 of file Mesh.C.
References _size, CVector::x(), CVector::y(), and CVector::z().
Referenced by shapef_jacobian_at().

|
inline |
Definition at line 641 of file Mesh.H.
References _size.
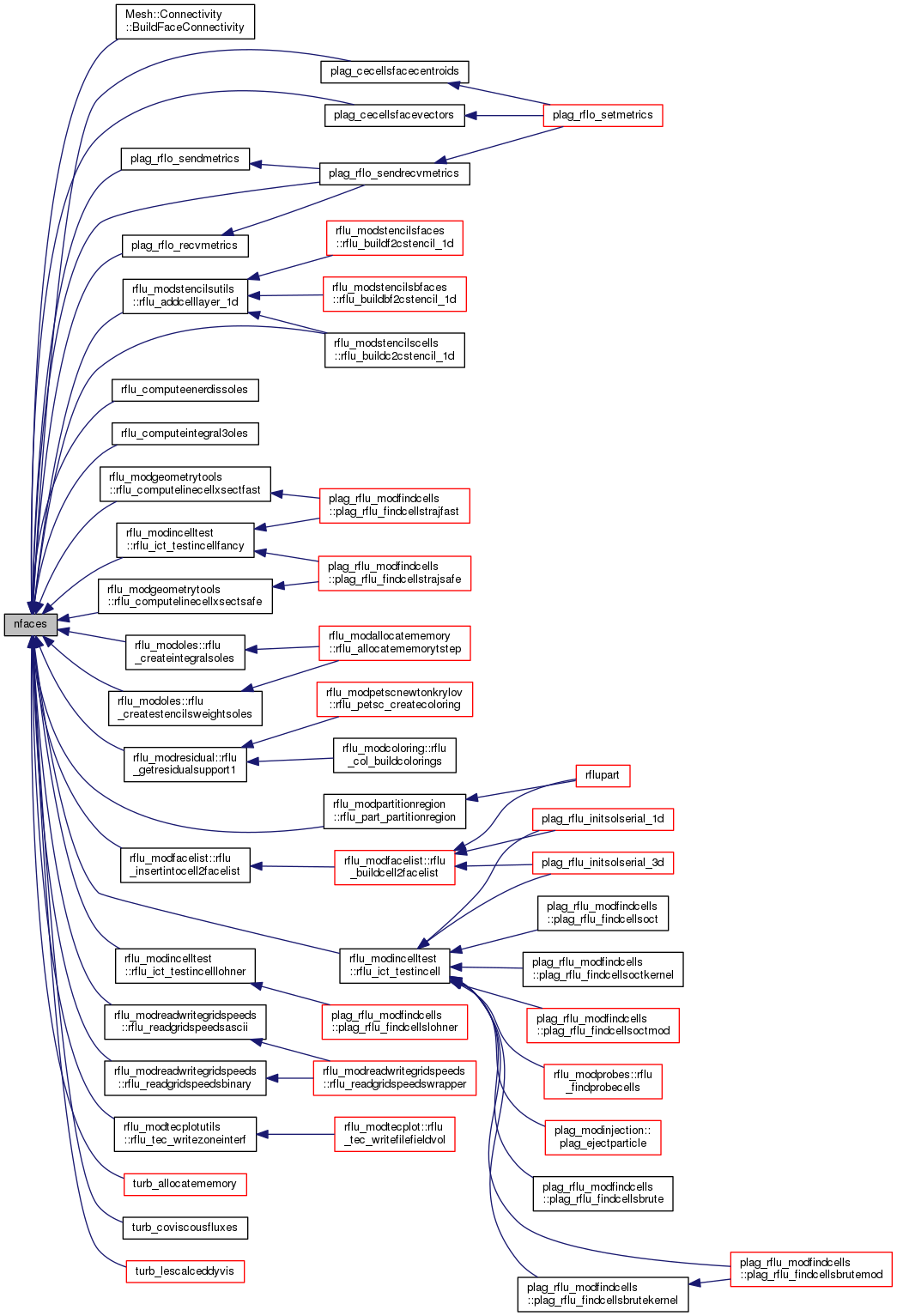
Referenced by Mesh::Connectivity::BuildFaceConnectivity(), plag_cecellsfacecentroids(), plag_cecellsfacevectors(), plag_rflo_recvmetrics(), plag_rflo_sendmetrics(), plag_rflo_sendrecvmetrics(), rflu_modstencilsutils::rflu_addcelllayer_1d(), rflu_modstencilscells::rflu_buildc2cstencil_1d(), rflu_computeenerdissoles(), rflu_computeintegral3oles(), rflu_modgeometrytools::rflu_computelinecellxsectfast(), rflu_modgeometrytools::rflu_computelinecellxsectsafe(), rflu_modoles::rflu_createintegralsoles(), rflu_modoles::rflu_createstencilsweightsoles(), rflu_modresidual::rflu_getresidualsupport1(), rflu_modincelltest::rflu_ict_testincell(), rflu_modincelltest::rflu_ict_testincellfancy(), rflu_modincelltest::rflu_ict_testincelllohner(), rflu_modfacelist::rflu_insertintocell2facelist(), rflu_modpartitionregion::rflu_part_partitionregion(), rflu_modreadwritegridspeeds::rflu_readgridspeedsascii(), rflu_modreadwritegridspeeds::rflu_readgridspeedsbinary(), rflu_modtecplotutils::rflu_tec_writezoneinterf(), turb_allocatememory(), turb_coviscousfluxes(), and turb_lescalceddyvis().
| void ReOrient | ( | std::vector< IndexType > & | ec | ) |
| void shape_func | ( | const GeoPrim::CVector & | nc, |
| double | SF[] | ||
| ) | const |
Definition at line 906 of file Mesh.C.
References _size, CVector::x(), CVector::y(), and CVector::z().
Referenced by shapef_jacobian_at().

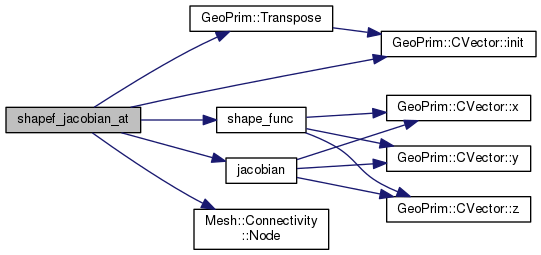
| void shapef_jacobian_at | ( | const GeoPrim::CPoint & | p, |
| GeoPrim::CVector & | natc, | ||
| IndexType | elnum, | ||
| const Connectivity & | ec, | ||
| const NodalCoordinates & | nc, | ||
| GeoPrim::CVector & | fvec, | ||
| GeoPrim::CVector | fjac[] | ||
| ) | const |
Definition at line 883 of file Mesh.C.
References _size, i, CVector::init(), jacobian(), Mesh::Connectivity::Node(), shape_func(), and GeoPrim::Transpose().
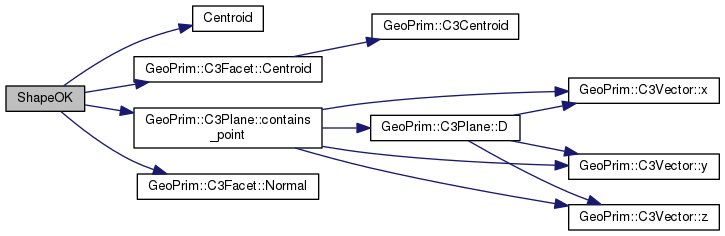
| bool ShapeOK | ( | std::vector< IndexType > & | ec, |
| NodalCoordinates & | nc | ||
| ) | const |
Definition at line 1521 of file Mesh.C.
References _size, Centroid(), C3Facet::Centroid(), C3Plane::contains_point(), C3Facet::Normal(), and p1.
Referenced by main().

|
protected |
Definition at line 602 of file Mesh.H.
Referenced by dshape_func(), get_face_connectivities(), init(), interpolate(), Inverted(), jacobian(), nedges(), nfaces(), ReOrient(), shape_func(), shapef_jacobian_at(), ShapeOK(), and size().
 1.8.5
1.8.5