 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
Classes | |
| class | CPoint |
| class | CVector |
| class | C3Vector |
| /brief Cartesian 3 Vector More... | |
| class | CLine |
| class | CLineSegment |
| class | CBox |
| class | CPlane |
| class | C3Plane |
| class | CFacet |
| class | C3Facet |
Typedefs | |
| typedef C3Vector | C3Point |
Functions | |
| template<typename PointContainer > | |
| C3Point | C3Centroid (const PointContainer &pc) |
| template<typename PointContainer > | |
| CPoint | Centroid (const PointContainer &pc) |
| void | Transpose (CVector matrix[]) |
| void | Transpose_2x3 (CVector matrix[], double tpose[][2]) |
| double | Distance (const CPoint &p, const CLine &l) |
| double | Distance (const C3Point &p, const CLine &l) |
| std::ostream & | operator<< (std::ostream &oS, const GeoPrim::CBox &b) |
| std::ostream & | operator<< (std::ostream &oS, const GeoPrim::CPoint &p) |
| std::istream & | operator>> (std::istream &iS, GeoPrim::CPoint &p) |
| std::ostream & | operator<< (std::ostream &oS, const GeoPrim::CVector &v) |
| std::istream & | operator>> (std::istream &iS, GeoPrim::CVector &v) |
| std::ostream & | operator<< (std::ostream &oS, const GeoPrim::C3Vector &v) |
| std::istream & | operator>> (std::istream &iS, GeoPrim::C3Vector &v) |
| GeoPrim::CPoint | operator* (double scalar, const GeoPrim::CPoint &p) |
| GeoPrim::C3Vector | operator* (double scalar, const GeoPrim::C3Vector &v) |
| GeoPrim::CVector | operator* (double scalar, const GeoPrim::CVector &v) |
Variables | |
| const double | TOL = 1e-16 |
| const double | PI = 4.0*atan(1.0) |
Definition at line 763 of file GeoPrimitives.H.
| C3Point GeoPrim::C3Centroid | ( | const PointContainer & | pc | ) |
Definition at line 1481 of file GeoPrimitives.H.
Referenced by C3Facet::Centroid().

| CPoint GeoPrim::Centroid | ( | const PointContainer & | pc | ) |
Definition at line 1501 of file GeoPrimitives.H.
Referenced by CFacet::centroid().

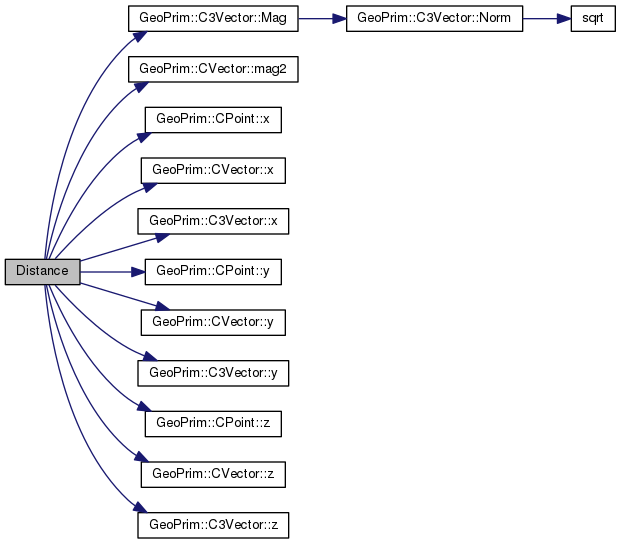
| double GeoPrim::Distance | ( | const C3Point & | p, |
| const CLine & | l | ||
| ) |
Definition at line 45 of file GeoPrimitives.C.
References C3Vector::Mag(), CVector::mag2(), CLine::p, v, CLine::v, CPoint::x(), CVector::x(), C3Vector::x(), CPoint::y(), CVector::y(), C3Vector::y(), CPoint::z(), CVector::z(), and C3Vector::z().
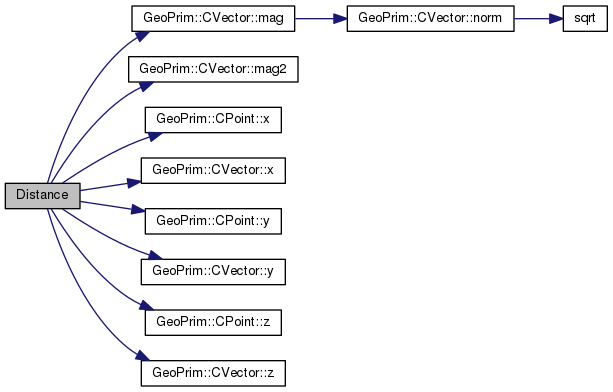
| double Distance | ( | const CPoint & | p, |
| const CLine & | l | ||
| ) |
Definition at line 35 of file GeoPrimitives.C.
References CVector::mag(), CVector::mag2(), CLine::p, v, CLine::v, CPoint::x(), CVector::x(), CPoint::y(), CVector::y(), CPoint::z(), and CVector::z().
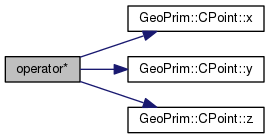
| GeoPrim::CPoint GeoPrim::operator* | ( | double | scalar, |
| const GeoPrim::CPoint & | p | ||
| ) |
Definition at line 117 of file GeoPrimitives.C.
References CPoint::x(), CPoint::y(), and CPoint::z().
| GeoPrim::C3Vector GeoPrim::operator* | ( | double | scalar, |
| const GeoPrim::C3Vector & | v | ||
| ) |
Definition at line 126 of file GeoPrimitives.C.
| GeoPrim::CVector GeoPrim::operator* | ( | double | scalar, |
| const GeoPrim::CVector & | v | ||
| ) |
Definition at line 132 of file GeoPrimitives.C.
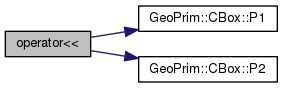
| std::ostream& GeoPrim::operator<< | ( | std::ostream & | oS, |
| const GeoPrim::CBox & | b | ||
| ) |
Definition at line 55 of file GeoPrimitives.C.
References CBox::P1(), and CBox::P2().
| std::ostream& GeoPrim::operator<< | ( | std::ostream & | oS, |
| const GeoPrim::CPoint & | p | ||
| ) |
Definition at line 62 of file GeoPrimitives.C.
References CPoint::x(), CPoint::y(), and CPoint::z().
| std::ostream& GeoPrim::operator<< | ( | std::ostream & | oS, |
| const GeoPrim::CVector & | v | ||
| ) |
Definition at line 90 of file GeoPrimitives.C.
References CVector::x(), CVector::y(), and CVector::z().
| std::ostream& GeoPrim::operator<< | ( | std::ostream & | oS, |
| const GeoPrim::C3Vector & | v | ||
| ) |
Definition at line 104 of file GeoPrimitives.C.
References C3Vector::x(), C3Vector::y(), and C3Vector::z().
| std::istream& GeoPrim::operator>> | ( | std::istream & | iS, |
| GeoPrim::CPoint & | p | ||
| ) |
Definition at line 69 of file GeoPrimitives.C.
| std::istream& GeoPrim::operator>> | ( | std::istream & | iS, |
| GeoPrim::CVector & | v | ||
| ) |
Definition at line 97 of file GeoPrimitives.C.
| std::istream& GeoPrim::operator>> | ( | std::istream & | iS, |
| GeoPrim::C3Vector & | v | ||
| ) |
Definition at line 111 of file GeoPrimitives.C.
| void Transpose | ( | CVector | matrix[] | ) |
Definition at line 11 of file GeoPrimitives.C.
References CVector::init(), x, y, and z.
Referenced by Mesh::GenericCell_2::shapef_jacobian_at(), and Mesh::GenericElement::shapef_jacobian_at().

| void Transpose_2x3 | ( | CVector | matrix[], |
| double | tpose[][2] | ||
| ) |
Definition at line 24 of file GeoPrimitives.C.
References CVector::x(), CVector::y(), and CVector::z().
| const double PI = 4.0*atan(1.0) |
Definition at line 18 of file GeoPrimitives.H.
Referenced by CFacet::contains_point().
| const double TOL = 1e-16 |
Definition at line 17 of file GeoPrimitives.H.
Referenced by CPlane::contains_point(), C3Plane::contains_point(), CFacet::contains_point(), determine_probe_value(), CBox::empty(), Numerics::fpointequals(), CLine::has_point(), CPoint::operator==(), CVector::operator==(), and C3Vector::operator==().
 1.8.5
1.8.5