 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
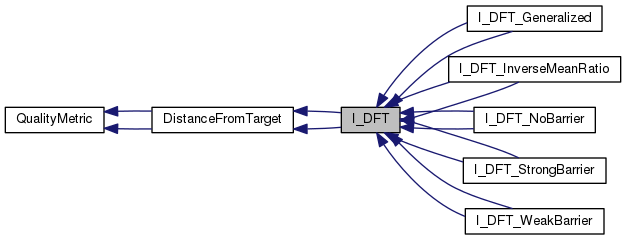
Class containing the target corner matrices for the context based smoothing. More...
#include <I_DFT.hpp>
Public Member Functions | |
| I_DFT () | |
| virtual | ~I_DFT () |
| virtual destructor ensures use of polymorphism during destruction More... | |
| bool | evaluate_element (PatchData &pd, MsqMeshEntity *e, double &m, MsqError &err) |
| Evaluate the metric for an element. More... | |
| bool | compute_element_analytical_gradient (PatchData &pd, MsqMeshEntity *e, MsqVertex *fv[], Vector3D g[], int nfv, double &m, MsqError &err) |
| Virtual function that computes the gradient of the QualityMetric analytically. The base class implementation of this function simply prints a warning and calls compute_numerical_gradient to calculate the gradient. This is used by metric which mType is ELEMENT_BASED. For parameters, see compute_element_gradient() . More... | |
| bool | compute_element_analytical_hessian (PatchData &pd, MsqMeshEntity *e, MsqVertex *fv[], Vector3D g[], Matrix3D h[], int nfv, double &m, MsqError &err) |
| I_DFT () | |
| virtual | ~I_DFT () |
| virtual destructor ensures use of polymorphism during destruction More... | |
| bool | evaluate_element (PatchData &pd, MsqMeshEntity *e, double &m, MsqError &err) |
| Evaluate the metric for an element. More... | |
| bool | compute_element_analytical_gradient (PatchData &pd, MsqMeshEntity *e, MsqVertex *fv[], Vector3D g[], int nfv, double &m, MsqError &err) |
| Virtual function that computes the gradient of the QualityMetric analytically. The base class implementation of this function simply prints a warning and calls compute_numerical_gradient to calculate the gradient. This is used by metric which mType is ELEMENT_BASED. For parameters, see compute_element_gradient() . More... | |
| bool | compute_element_analytical_hessian (PatchData &pd, MsqMeshEntity *e, MsqVertex *fv[], Vector3D g[], Matrix3D h[], int nfv, double &m, MsqError &err) |
 Public Member Functions inherited from DistanceFromTarget Public Member Functions inherited from DistanceFromTarget | |
| virtual | ~DistanceFromTarget () |
| virtual destructor ensures use of polymorphism during destruction More... | |
| virtual | ~DistanceFromTarget () |
| virtual destructor ensures use of polymorphism during destruction More... | |
| Public Member Functions inherited from QualityMetric | |
| virtual | ~QualityMetric () |
| MetricType | get_metric_type () |
| void | set_element_evaluation_mode (ElementEvaluationMode mode, MsqError &err) |
| Sets the evaluation mode for the ELEMENT_BASED metrics. More... | |
| ElementEvaluationMode | get_element_evaluation_mode () |
| Returns the evaluation mode for the metric. More... | |
| void | set_averaging_method (AveragingMethod method, MsqError &err) |
| void | set_feasible_constraint (int alpha) |
| int | get_feasible_constraint () |
| Returns the feasible flag for this metric. More... | |
| void | set_name (msq_std::string st) |
| Sets the name of this metric. More... | |
| msq_std::string | get_name () |
| Returns the name of this metric (as a string). More... | |
| double | vertex_barrier_function (double det, double delta) |
| Escobar Barrier Function for Shape and Other Metrics. More... | |
| virtual bool | evaluate_vertex (PatchData &, MsqVertex *, double &, MsqError &err) |
| Evaluate the metric for a vertex. More... | |
| void | set_gradient_type (GRADIENT_TYPE grad) |
| Sets gradType for this metric. More... | |
| void | set_hessian_type (HESSIAN_TYPE ht) |
| Sets hessianType for this metric. More... | |
| bool | compute_vertex_gradient (PatchData &pd, MsqVertex &vertex, MsqVertex *vertices[], Vector3D grad_vec[], int num_vtx, double &metric_value, MsqError &err) |
| Calls compute_vertex_numerical_gradient if gradType equals NUMERCIAL_GRADIENT. Calls compute_vertex_analytical_gradient if gradType equals ANALYTICAL_GRADIENT;. More... | |
| bool | compute_element_gradient (PatchData &pd, MsqMeshEntity *element, MsqVertex *free_vtces[], Vector3D grad_vec[], int num_free_vtx, double &metric_value, MsqError &err) |
| For MetricType == ELEMENT_BASED. Calls either compute_element_numerical_gradient() or compute_element_analytical_gradient() for gradType equal NUMERICAL_GRADIENT or ANALYTICAL_GRADIENT, respectively. More... | |
| bool | compute_element_gradient_expanded (PatchData &pd, MsqMeshEntity *element, MsqVertex *free_vtces[], Vector3D grad_vec[], int num_free_vtx, double &metric_value, MsqError &err) |
| bool | compute_element_hessian (PatchData &pd, MsqMeshEntity *element, MsqVertex *free_vtces[], Vector3D grad_vec[], Matrix3D hessian[], int num_free_vtx, double &metric_value, MsqError &err) |
| For MetricType == ELEMENT_BASED. Calls either compute_element_numerical_hessian() or compute_element_analytical_hessian() for hessianType equal NUMERICAL_HESSIAN or ANALYTICAL_HESSIAN, respectively. More... | |
| void | set_negate_flag (int neg) |
| int | get_negate_flag () |
| Returns negateFlag. More... | |
| virtual void | change_metric_type (MetricType t, MsqError &err) |
| virtual | ~QualityMetric () |
| MetricType | get_metric_type () |
| void | set_element_evaluation_mode (ElementEvaluationMode mode, MsqError &err) |
| Sets the evaluation mode for the ELEMENT_BASED metrics. More... | |
| ElementEvaluationMode | get_element_evaluation_mode () |
| Returns the evaluation mode for the metric. More... | |
| void | set_averaging_method (AveragingMethod method, MsqError &err) |
| void | set_feasible_constraint (int alpha) |
| int | get_feasible_constraint () |
| Returns the feasible flag for this metric. More... | |
| void | set_name (msq_std::string st) |
| Sets the name of this metric. More... | |
| msq_std::string | get_name () |
| Returns the name of this metric (as a string). More... | |
| double | vertex_barrier_function (double det, double delta) |
| Escobar Barrier Function for Shape and Other Metrics. More... | |
| virtual bool | evaluate_vertex (PatchData &, MsqVertex *, double &, MsqError &err) |
| Evaluate the metric for a vertex. More... | |
| void | set_gradient_type (GRADIENT_TYPE grad) |
| Sets gradType for this metric. More... | |
| void | set_hessian_type (HESSIAN_TYPE ht) |
| Sets hessianType for this metric. More... | |
| bool | compute_vertex_gradient (PatchData &pd, MsqVertex &vertex, MsqVertex *vertices[], Vector3D grad_vec[], int num_vtx, double &metric_value, MsqError &err) |
| bool | compute_element_gradient (PatchData &pd, MsqMeshEntity *element, MsqVertex *free_vtces[], Vector3D grad_vec[], int num_free_vtx, double &metric_value, MsqError &err) |
| For MetricType == ELEMENT_BASED. Calls either compute_element_numerical_gradient() or compute_element_analytical_gradient() for gradType equal NUMERICAL_GRADIENT or ANALYTICAL_GRADIENT, respectively. More... | |
| bool | compute_element_gradient_expanded (PatchData &pd, MsqMeshEntity *element, MsqVertex *free_vtces[], Vector3D grad_vec[], int num_free_vtx, double &metric_value, MsqError &err) |
| bool | compute_element_hessian (PatchData &pd, MsqMeshEntity *element, MsqVertex *free_vtces[], Vector3D grad_vec[], Matrix3D hessian[], int num_free_vtx, double &metric_value, MsqError &err) |
| For MetricType == ELEMENT_BASED. Calls either compute_element_numerical_hessian() or compute_element_analytical_hessian() for hessianType equal NUMERICAL_HESSIAN or ANALYTICAL_HESSIAN, respectively. More... | |
| void | set_negate_flag (int neg) |
| int | get_negate_flag () |
| Returns negateFlag. More... | |
| virtual void | change_metric_type (MetricType t, MsqError &err) |
Protected Member Functions | |
| void | p_set_alpha (double alpha) |
| access function to set mAlpha More... | |
| double | p_get_alpha () |
| access function to get mAlpha More... | |
| void | p_set_beta (double beta) |
| access function to set mBeta More... | |
| double | p_get_beta () |
| access function to get mBeta More... | |
| void | p_set_gamma (double gamma) |
| access function to set mGamma More... | |
| double | p_get_gamma () |
| access function to get mGamma More... | |
| void | p_set_use_barrier_delta (bool use_delta) |
| access function to set useBarrierDelta More... | |
| bool | p_get_use_barrier_delta () |
| access function to get useBarrierDelta More... | |
| void | p_set_alpha (double alpha) |
| access function to set mAlpha More... | |
| double | p_get_alpha () |
| access function to get mAlpha More... | |
| void | p_set_beta (double beta) |
| access function to set mBeta More... | |
| double | p_get_beta () |
| access function to get mBeta More... | |
| void | p_set_gamma (double gamma) |
| access function to set mGamma More... | |
| double | p_get_gamma () |
| access function to get mGamma More... | |
| void | p_set_use_barrier_delta (bool use_delta) |
| access function to set useBarrierDelta More... | |
| bool | p_get_use_barrier_delta () |
| access function to get useBarrierDelta More... | |
| Protected Member Functions inherited from DistanceFromTarget | |
| void | compute_T_matrices (MsqMeshEntity &elem, PatchData &pd, Matrix3D T[], size_t num_T, double c_k[], MsqError &err) |
For a given element, compute each corner matrix A, and given a target corner matrix W, returns  for each corner. More... for each corner. More... | |
| bool | get_barrier_function (PatchData &pd, const double &tau, double &h, MsqError &err) |
| void | compute_T_matrices (MsqMeshEntity &elem, PatchData &pd, Matrix3D T[], size_t num_T, double c_k[], MsqError &err) |
| For a given element, compute each corner matrix A, and given a target corner matrix W, returns for each corner. More... | |
| bool | get_barrier_function (PatchData &pd, const double &tau, double &h, MsqError &err) |
| Protected Member Functions inherited from QualityMetric | |
| QualityMetric () | |
| void | set_metric_type (MetricType t) |
| This function should be used in the constructor of every concrete quality metric. More... | |
| double | average_metrics (const double metric_values[], const int &num_values, MsqError &err) |
| average_metrics takes an array of length num_values and averages the contents using averaging method data member avgMethod . More... | |
| double | average_metric_and_weights (double metric_values[], int num_metric_values, MsqError &err) |
| Given a list of metric values, calculate the average metric valude according to the current avgMethod and write into the passed metric_values array the the value weight/count to use when averaging gradient vectors for the metric. More... | |
| double | weighted_average_metrics (const double coef[], const double metric_values[], const int &num_values, MsqError &err) |
| takes an array of coefficients and an array of metrics (both of length num_value) and averages the contents using averaging method 'method'. More... | |
| bool | compute_vertex_numerical_gradient (PatchData &pd, MsqVertex &vertex, MsqVertex *vertices[], Vector3D grad_vec[], int num_vtx, double &metric_value, MsqError &err) |
| bool | compute_element_numerical_gradient (PatchData &pd, MsqMeshEntity *element, MsqVertex *free_vtces[], Vector3D grad_vec[], int num_free_vtx, double &metric_value, MsqError &err) |
| Non-virtual function which numerically computes the gradient of a QualityMetric of a given element for a given set of free vertices on that element. This is used by metric which mType is ELEMENT_BASED. For parameters, see compute_element_gradient() . More... | |
| virtual bool | compute_vertex_analytical_gradient (PatchData &pd, MsqVertex &vertex, MsqVertex *vertices[], Vector3D grad_vec[], int num_vtx, double &metric_value, MsqError &err) |
| Virtual function that computes the gradient of the QualityMetric analytically. The base class implementation of this function simply prints a warning and calls compute_numerical_gradient to calculate the gradient. This is used by metric which mType is VERTEX_BASED. More... | |
| bool | compute_element_numerical_hessian (PatchData &pd, MsqMeshEntity *element, MsqVertex *free_vtces[], Vector3D grad_vec[], Matrix3D hessian[], int num_free_vtx, double &metric_value, MsqError &err) |
| QualityMetric () | |
| void | set_metric_type (MetricType t) |
| This function should be used in the constructor of every concrete quality metric. More... | |
| double | average_metrics (const double metric_values[], const int &num_values, MsqError &err) |
| average_metrics takes an array of length num_values and averages the contents using averaging method data member avgMethod . More... | |
| double | average_metric_and_weights (double metric_values[], int num_metric_values, MsqError &err) |
| Given a list of metric values, calculate the average metric valude according to the current avgMethod and write into the passed metric_values array the the value weight/count to use when averaging gradient vectors for the metric. More... | |
| double | weighted_average_metrics (const double coef[], const double metric_values[], const int &num_values, MsqError &err) |
| takes an array of coefficients and an array of metrics (both of length num_value) and averages the contents using averaging method 'method'. More... | |
| bool | compute_vertex_numerical_gradient (PatchData &pd, MsqVertex &vertex, MsqVertex *vertices[], Vector3D grad_vec[], int num_vtx, double &metric_value, MsqError &err) |
| bool | compute_element_numerical_gradient (PatchData &pd, MsqMeshEntity *element, MsqVertex *free_vtces[], Vector3D grad_vec[], int num_free_vtx, double &metric_value, MsqError &err) |
| Non-virtual function which numerically computes the gradient of a QualityMetric of a given element for a given set of free vertices on that element. This is used by metric which mType is ELEMENT_BASED. For parameters, see compute_element_gradient() . More... | |
| virtual bool | compute_vertex_analytical_gradient (PatchData &pd, MsqVertex &vertex, MsqVertex *vertices[], Vector3D grad_vec[], int num_vtx, double &metric_value, MsqError &err) |
| Virtual function that computes the gradient of the QualityMetric analytically. The base class implementation of this function simply prints a warning and calls compute_numerical_gradient to calculate the gradient. This is used by metric which mType is VERTEX_BASED. More... | |
| bool | compute_element_numerical_hessian (PatchData &pd, MsqMeshEntity *element, MsqVertex *free_vtces[], Vector3D grad_vec[], Matrix3D hessian[], int num_free_vtx, double &metric_value, MsqError &err) |
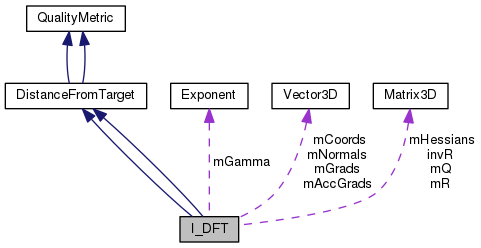
Private Attributes | |
| double | mAlpha |
| double | mBeta |
| Exponent | mGamma |
| bool | useBarrierDelta |
| Vector3D | mNormals [4] |
| Vector3D | mCoords [4] |
| Vector3D | mGrads [4] |
| Vector3D | mAccGrads [8] |
| Matrix3D | mHessians [10] |
| Matrix3D | mR |
| Matrix3D | invR |
| Matrix3D | mQ |
Class containing the target corner matrices for the context based smoothing.
The form of this metric is as follows (taken from I_DFTFamilyFunctions.hpp, see that file for more detail):
mAlpha * || A*inv(W) - mBeta * I ||_F^2 \n
---------------------------------------------------------------—
0.5^(mGamma)*(det(A*inv(W)) + sqrt(det(A*inv(W))^2 + 4*delta^2))^(mGamma)
The default for data members (corresponding to the variables above):
mAlpha = 1/2.0; \n mBeta = 1.0; \n mGamma = MSQ_TWO_THIRDS; \n
delta, above, is calculated using PatchData::get_barrier_delta(MsqError &err), if useBarrierDelta == true. Otherwise, delta is zero.
Definition at line 69 of file includeLinks/I_DFT.hpp.
|
inline |
Definition at line 73 of file includeLinks/I_DFT.hpp.
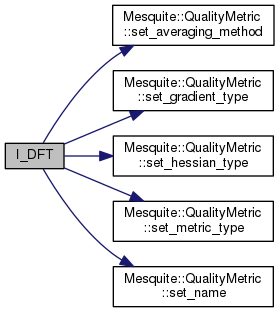
References QualityMetric::ANALYTICAL_GRADIENT, QualityMetric::ANALYTICAL_HESSIAN, QualityMetric::ELEMENT_BASED, QualityMetric::LINEAR, I_DFT::mAlpha, I_DFT::mBeta, I_DFT::mGamma, Mesquite::MSQ_TWO_THIRDS, QualityMetric::set_averaging_method(), QualityMetric::set_gradient_type(), QualityMetric::set_hessian_type(), QualityMetric::set_metric_type(), QualityMetric::set_name(), and I_DFT::useBarrierDelta.
|
inlinevirtual |
virtual destructor ensures use of polymorphism during destruction
Definition at line 88 of file includeLinks/I_DFT.hpp.
|
inline |
Definition at line 73 of file src/QualityMetric/DFT/I_DFT.hpp.
References QualityMetric::ANALYTICAL_GRADIENT, QualityMetric::ANALYTICAL_HESSIAN, QualityMetric::ELEMENT_BASED, QualityMetric::LINEAR, I_DFT::mAlpha, I_DFT::mBeta, I_DFT::mGamma, Mesquite::MSQ_TWO_THIRDS, QualityMetric::set_averaging_method(), QualityMetric::set_gradient_type(), QualityMetric::set_hessian_type(), QualityMetric::set_metric_type(), QualityMetric::set_name(), and I_DFT::useBarrierDelta.
|
inlinevirtual |
virtual destructor ensures use of polymorphism during destruction
Definition at line 88 of file src/QualityMetric/DFT/I_DFT.hpp.
|
virtual |
Virtual function that computes the gradient of the QualityMetric analytically. The base class implementation of this function simply prints a warning and calls compute_numerical_gradient to calculate the gradient. This is used by metric which mType is ELEMENT_BASED. For parameters, see compute_element_gradient() .
If that function is not over-riden in the concrete class, the base
Parameters description, see QualityMetric::compute_element_gradient() .
Reimplemented from QualityMetric.
Definition at line 174 of file QualityMetric/DFT/I_DFT.cpp.
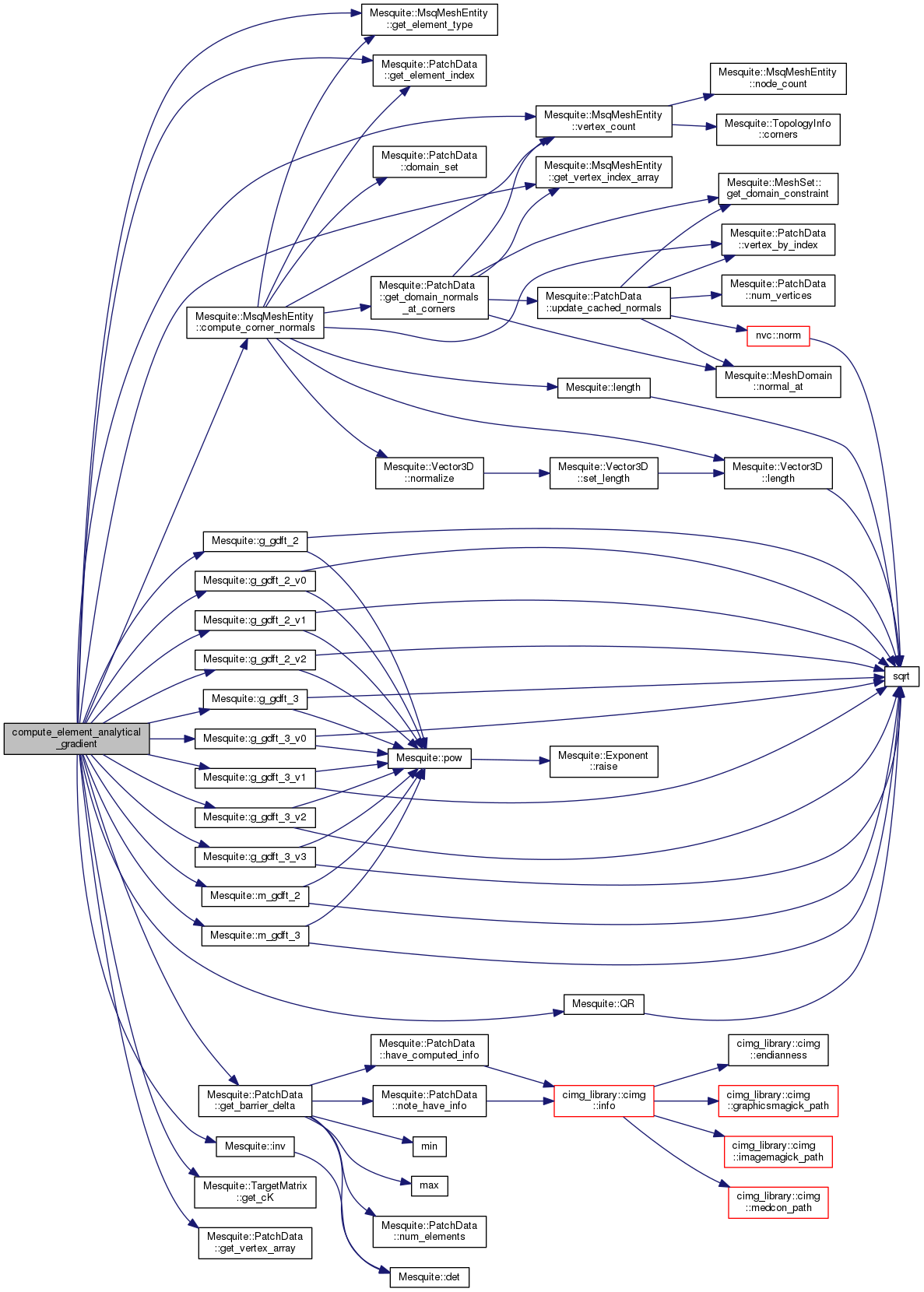
References MsqMeshEntity::compute_corner_normals(), Mesquite::g_gdft_2(), Mesquite::g_gdft_2_v0(), Mesquite::g_gdft_2_v1(), Mesquite::g_gdft_2_v2(), Mesquite::g_gdft_3(), Mesquite::g_gdft_3_v0(), Mesquite::g_gdft_3_v1(), Mesquite::g_gdft_3_v2(), Mesquite::g_gdft_3_v3(), PatchData::get_barrier_delta(), TargetMatrix::get_cK(), PatchData::get_element_index(), MsqMeshEntity::get_element_type(), PatchData::get_vertex_array(), MsqMeshEntity::get_vertex_index_array(), Mesquite::HEXAHEDRON, i, Mesquite::inv(), I_DFT::invR, j, Mesquite::m_gdft_2(), Mesquite::m_gdft_3(), I_DFT::mAccGrads, I_DFT::mAlpha, I_DFT::mBeta, I_DFT::mCoords, I_DFT::mGamma, I_DFT::mGrads, I_DFT::mNormals, I_DFT::mQ, I_DFT::mR, Mesquite::MSQ_3RT_2_OVER_6RT_3, MSQ_ERRZERO, Mesquite::MSQ_ONE_THIRD, MSQ_SETERR, MsqError::NOT_IMPLEMENTED, Mesquite::QR(), Mesquite::QUADRILATERAL, PatchData::targetMatrices, Mesquite::TETRAHEDRON, Mesquite::TRIANGLE, I_DFT::useBarrierDelta, and MsqMeshEntity::vertex_count().
|
virtual |
Virtual function that computes the gradient of the QualityMetric analytically. The base class implementation of this function simply prints a warning and calls compute_numerical_gradient to calculate the gradient. This is used by metric which mType is ELEMENT_BASED. For parameters, see compute_element_gradient() .
If that function is not over-riden in the concrete class, the base
Parameters description, see QualityMetric::compute_element_gradient() .
Reimplemented from QualityMetric.
|
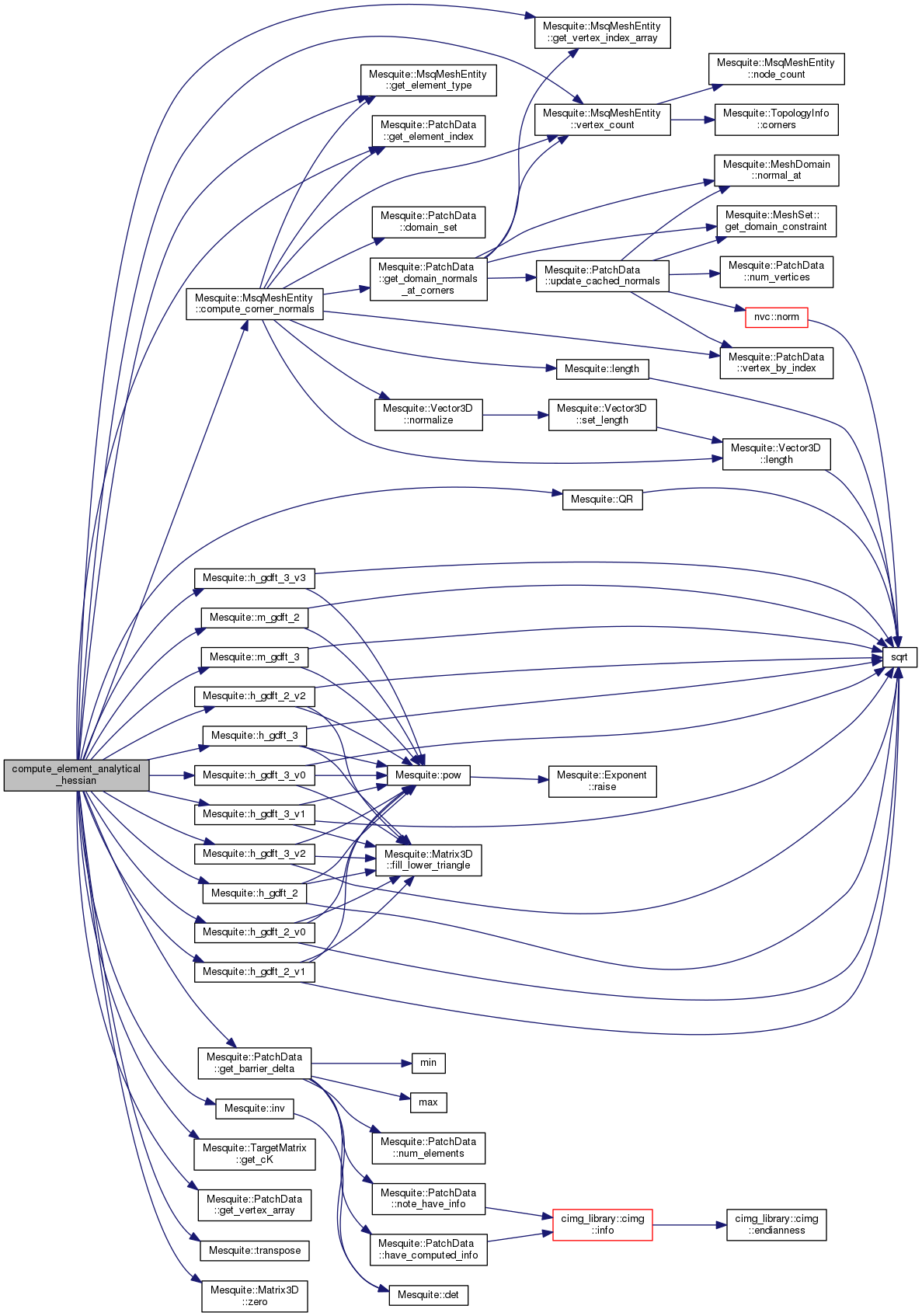
virtual |
If that function is not over-riden in the concrete class, the base class function makes it default to a numerical hessian.
For parameters description, see QualityMetric::compute_element_hessian() .
Reimplemented from QualityMetric.
Definition at line 658 of file QualityMetric/DFT/I_DFT.cpp.
References MsqMeshEntity::compute_corner_normals(), PatchData::get_barrier_delta(), TargetMatrix::get_cK(), PatchData::get_element_index(), MsqMeshEntity::get_element_type(), PatchData::get_vertex_array(), MsqMeshEntity::get_vertex_index_array(), Mesquite::h_gdft_2(), Mesquite::h_gdft_2_v0(), Mesquite::h_gdft_2_v1(), Mesquite::h_gdft_2_v2(), Mesquite::h_gdft_3(), Mesquite::h_gdft_3_v0(), Mesquite::h_gdft_3_v1(), Mesquite::h_gdft_3_v2(), Mesquite::h_gdft_3_v3(), Mesquite::HEXAHEDRON, i, Mesquite::inv(), I_DFT::invR, j, k, Mesquite::m_gdft_2(), Mesquite::m_gdft_3(), I_DFT::mAlpha, I_DFT::mBeta, I_DFT::mCoords, I_DFT::mGamma, I_DFT::mGrads, I_DFT::mHessians, I_DFT::mNormals, I_DFT::mQ, I_DFT::mR, Mesquite::MSQ_3RT_2_OVER_6RT_3, MSQ_ERRZERO, Mesquite::MSQ_ONE_THIRD, MSQ_SETERR, MsqError::NOT_IMPLEMENTED, Mesquite::QR(), Mesquite::QUADRILATERAL, PatchData::targetMatrices, Mesquite::TETRAHEDRON, Mesquite::transpose(), Mesquite::TRIANGLE, I_DFT::useBarrierDelta, MsqMeshEntity::vertex_count(), and Matrix3D::zero().
|
virtual |
If that function is not over-riden in the concrete class, the base class function makes it default to a numerical hessian.
For parameters description, see QualityMetric::compute_element_hessian() .
Reimplemented from QualityMetric.
|
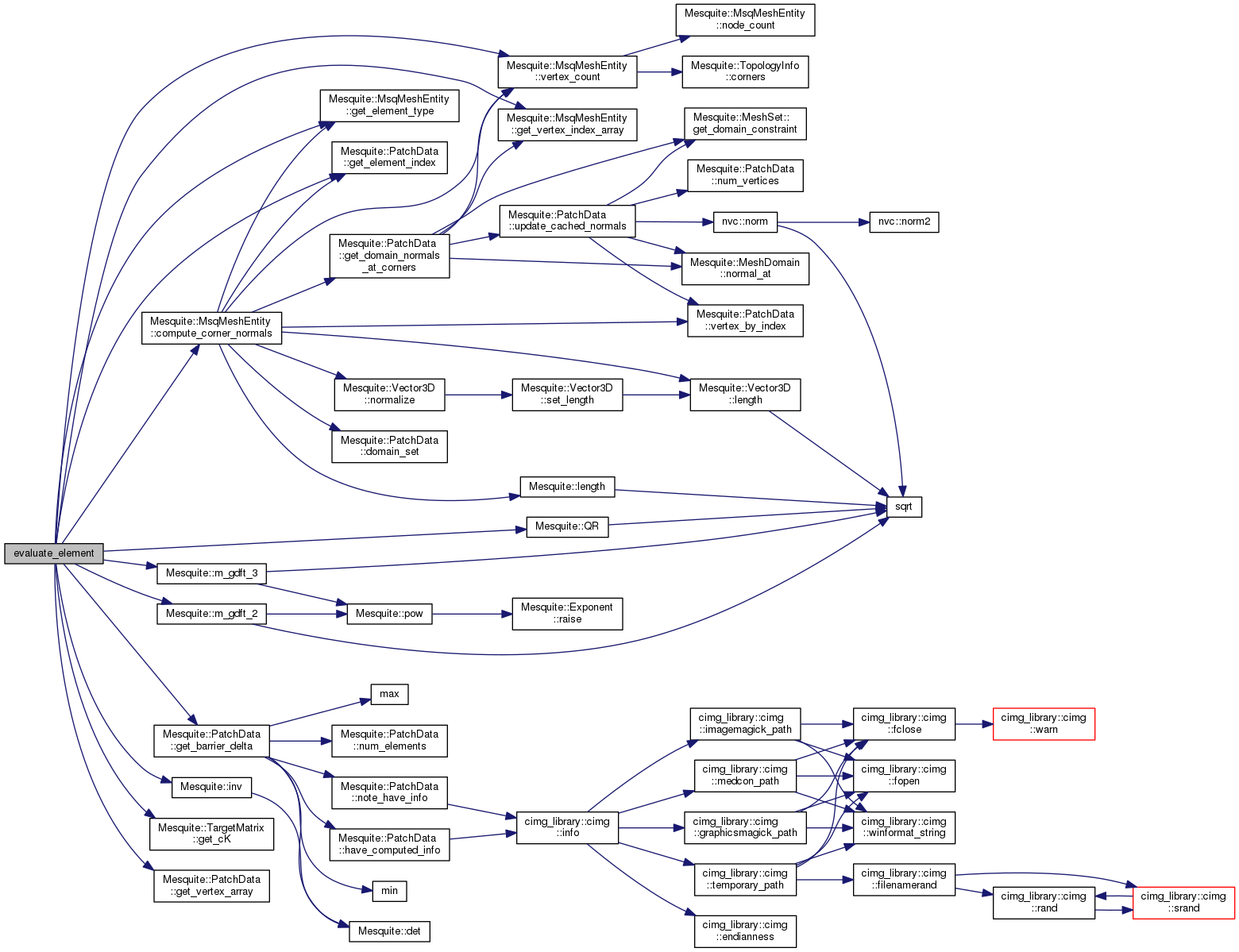
virtual |
Evaluate the metric for an element.
Reimplemented from QualityMetric.
Definition at line 43 of file QualityMetric/DFT/I_DFT.cpp.
References MsqMeshEntity::compute_corner_normals(), PatchData::get_barrier_delta(), TargetMatrix::get_cK(), PatchData::get_element_index(), MsqMeshEntity::get_element_type(), PatchData::get_vertex_array(), MsqMeshEntity::get_vertex_index_array(), Mesquite::HEXAHEDRON, i, Mesquite::inv(), I_DFT::invR, j, Mesquite::m_gdft_2(), Mesquite::m_gdft_3(), I_DFT::mAlpha, I_DFT::mBeta, I_DFT::mCoords, I_DFT::mGamma, I_DFT::mNormals, I_DFT::mQ, I_DFT::mR, Mesquite::MSQ_3RT_2_OVER_6RT_3, MSQ_ERRZERO, Mesquite::MSQ_ONE_THIRD, MSQ_SETERR, MsqError::NOT_IMPLEMENTED, Mesquite::QR(), Mesquite::QUADRILATERAL, PatchData::targetMatrices, Mesquite::TETRAHEDRON, Mesquite::TRIANGLE, I_DFT::useBarrierDelta, and MsqMeshEntity::vertex_count().
|
virtual |
Evaluate the metric for an element.
Reimplemented from QualityMetric.
|
inlineprotected |
access function to get mAlpha
Definition at line 119 of file src/QualityMetric/DFT/I_DFT.hpp.
References I_DFT::mAlpha.
|
inlineprotected |
access function to get mAlpha
Definition at line 119 of file includeLinks/I_DFT.hpp.
References I_DFT::mAlpha.
|
inlineprotected |
access function to get mBeta
Definition at line 125 of file src/QualityMetric/DFT/I_DFT.hpp.
References I_DFT::mBeta.
|
inlineprotected |
access function to get mBeta
Definition at line 125 of file includeLinks/I_DFT.hpp.
References I_DFT::mBeta.
|
inlineprotected |
access function to get mGamma
Definition at line 131 of file includeLinks/I_DFT.hpp.
References I_DFT::mGamma.
|
inlineprotected |
access function to get mGamma
Definition at line 131 of file src/QualityMetric/DFT/I_DFT.hpp.
References I_DFT::mGamma.
|
inlineprotected |
access function to get useBarrierDelta
Definition at line 137 of file includeLinks/I_DFT.hpp.
References I_DFT::useBarrierDelta.
|
inlineprotected |
access function to get useBarrierDelta
Definition at line 137 of file src/QualityMetric/DFT/I_DFT.hpp.
References I_DFT::useBarrierDelta.
|
inlineprotected |
access function to set mAlpha
Definition at line 116 of file includeLinks/I_DFT.hpp.
References I_DFT::mAlpha.
Referenced by I_DFT_Generalized::I_DFT_Generalized(), I_DFT_InverseMeanRatio::I_DFT_InverseMeanRatio(), I_DFT_NoBarrier::I_DFT_NoBarrier(), I_DFT_StrongBarrier::I_DFT_StrongBarrier(), I_DFT_WeakBarrier::I_DFT_WeakBarrier(), and I_DFT_Generalized::set_alpha().

|
inlineprotected |
access function to set mAlpha
Definition at line 116 of file src/QualityMetric/DFT/I_DFT.hpp.
References I_DFT::mAlpha.
|
inlineprotected |
access function to set mBeta
Definition at line 122 of file src/QualityMetric/DFT/I_DFT.hpp.
References I_DFT::mBeta.
|
inlineprotected |
access function to set mBeta
Definition at line 122 of file includeLinks/I_DFT.hpp.
References I_DFT::mBeta.
Referenced by I_DFT_Generalized::I_DFT_Generalized(), I_DFT_InverseMeanRatio::I_DFT_InverseMeanRatio(), I_DFT_NoBarrier::I_DFT_NoBarrier(), I_DFT_StrongBarrier::I_DFT_StrongBarrier(), I_DFT_WeakBarrier::I_DFT_WeakBarrier(), and I_DFT_Generalized::set_beta().

|
inlineprotected |
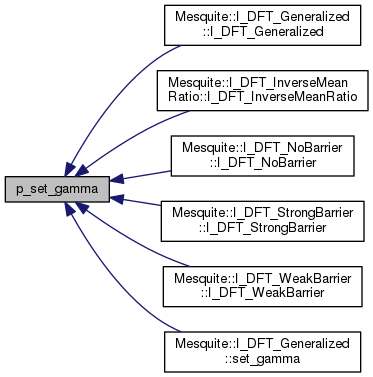
access function to set mGamma
Definition at line 128 of file src/QualityMetric/DFT/I_DFT.hpp.
References I_DFT::mGamma.
|
inlineprotected |
access function to set mGamma
Definition at line 128 of file includeLinks/I_DFT.hpp.
References I_DFT::mGamma.
Referenced by I_DFT_Generalized::I_DFT_Generalized(), I_DFT_InverseMeanRatio::I_DFT_InverseMeanRatio(), I_DFT_NoBarrier::I_DFT_NoBarrier(), I_DFT_StrongBarrier::I_DFT_StrongBarrier(), I_DFT_WeakBarrier::I_DFT_WeakBarrier(), and I_DFT_Generalized::set_gamma().
|
inlineprotected |
access function to set useBarrierDelta
Definition at line 134 of file includeLinks/I_DFT.hpp.
References I_DFT::useBarrierDelta.
Referenced by I_DFT_Generalized::I_DFT_Generalized(), I_DFT_InverseMeanRatio::I_DFT_InverseMeanRatio(), I_DFT_NoBarrier::I_DFT_NoBarrier(), I_DFT_StrongBarrier::I_DFT_StrongBarrier(), I_DFT_WeakBarrier::I_DFT_WeakBarrier(), and I_DFT_Generalized::set_use_barrier_delta().

|
inlineprotected |
access function to set useBarrierDelta
Definition at line 134 of file src/QualityMetric/DFT/I_DFT.hpp.
References I_DFT::useBarrierDelta.
|
private |
Definition at line 154 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient(), I_DFT::compute_element_analytical_hessian(), and I_DFT::evaluate_element().
|
private |
Definition at line 151 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient().
|
private |
Definition at line 143 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient(), I_DFT::compute_element_analytical_hessian(), I_DFT::evaluate_element(), I_DFT::I_DFT(), I_DFT::p_get_alpha(), and I_DFT::p_set_alpha().
|
private |
Definition at line 144 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient(), I_DFT::compute_element_analytical_hessian(), I_DFT::evaluate_element(), I_DFT::I_DFT(), I_DFT::p_get_beta(), and I_DFT::p_set_beta().
|
private |
Definition at line 149 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient(), I_DFT::compute_element_analytical_hessian(), and I_DFT::evaluate_element().
|
private |
Definition at line 145 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient(), I_DFT::compute_element_analytical_hessian(), I_DFT::evaluate_element(), I_DFT::I_DFT(), I_DFT::p_get_gamma(), and I_DFT::p_set_gamma().
|
private |
Definition at line 150 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient(), and I_DFT::compute_element_analytical_hessian().
|
private |
Definition at line 152 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_hessian().
|
private |
Definition at line 148 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient(), I_DFT::compute_element_analytical_hessian(), and I_DFT::evaluate_element().
|
private |
Definition at line 155 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient(), I_DFT::compute_element_analytical_hessian(), and I_DFT::evaluate_element().
|
private |
Definition at line 153 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient(), I_DFT::compute_element_analytical_hessian(), and I_DFT::evaluate_element().
|
private |
Definition at line 146 of file includeLinks/I_DFT.hpp.
Referenced by I_DFT::compute_element_analytical_gradient(), I_DFT::compute_element_analytical_hessian(), I_DFT::evaluate_element(), I_DFT::I_DFT(), I_DFT::p_get_use_barrier_delta(), and I_DFT::p_set_use_barrier_delta().
 1.8.5
1.8.5