 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
#include <fstream>#include <limits>#include <cstdlib>#include <sys/types.h>#include <sys/stat.h>#include <unistd.h>#include "rocman.h"#include "builtin_couplings.h"#include "derived_couplings.h"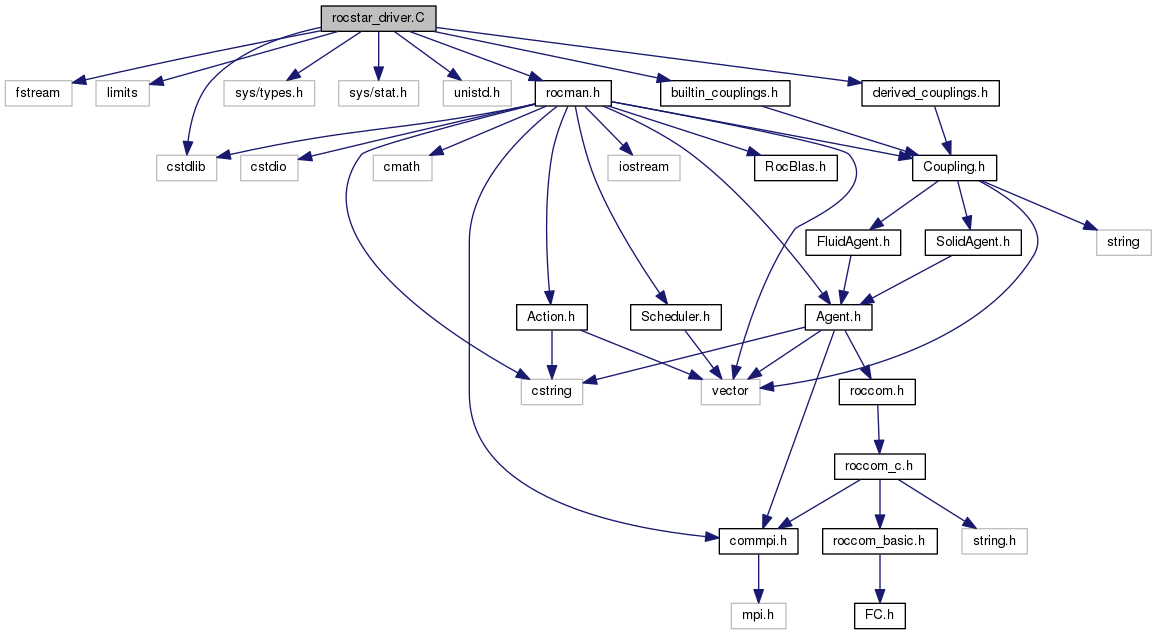
Go to the source code of this file.
Macros | |
| #define | COM_DOUBLE_ATTRIBUTE(attrname, varname) |
| #define | COM_INT_ATTRIBUTE(attrname, varname) |
| #define | COM_STRING_ATTRIBUTE(attrname, varname) |
| #define | COM_BOOL_ATTRIBUTE(attrname, varname) |
Functions | |
| COM_EXTERN_MODULE (Rocin) | |
| COM_EXTERN_MODULE (Rocout) | |
| void | init_profiling (Control_parameters ¶m, int comm_rank) |
| void | RocstarShutdown (int=0) |
| double | get_restart_time (const string &restart_file) |
| Coupling * | create_coupling (Control_parameters ¶m, const RocmanControl_parameters &rocman_param) |
| bool | reached_simulation_time (const Control_parameters ¶m) |
| bool | reached_restartdump_time (Control_parameters ¶m) |
| bool | reached_visdump_time (const Control_parameters ¶m) |
| int | check_for_interrupt (Coupling *coup, const Control_parameters ¶m) |
| void | rocstar_driver (int verb, int remeshed, bool debug) |
| void | debug_print (const std::string str, int pane, int pe, MPI_Comm comm, const char *memo) |
| void | debug_int_print (const std::string str, int pane, int pe, MPI_Comm comm, const char *memo) |
Variables | |
| int | man_verbose = 1 |
Definition in file rocstar_driver.C.
| #define COM_BOOL_ATTRIBUTE | ( | attrname, | |
| varname | |||
| ) |
Definition at line 159 of file rocstar_driver.C.
Referenced by Control_parameters::read(), and RocmanControl_parameters::read().
| #define COM_DOUBLE_ATTRIBUTE | ( | attrname, | |
| varname | |||
| ) |
Definition at line 141 of file rocstar_driver.C.
Referenced by Control_parameters::read(), and RocmanControl_parameters::read().
| #define COM_INT_ATTRIBUTE | ( | attrname, | |
| varname | |||
| ) |
Definition at line 147 of file rocstar_driver.C.
Referenced by Control_parameters::read(), and RocmanControl_parameters::read().
| #define COM_STRING_ATTRIBUTE | ( | attrname, | |
| varname | |||
| ) |
Definition at line 153 of file rocstar_driver.C.
Referenced by Control_parameters::read().
| int check_for_interrupt | ( | Coupling * | coup, |
| const Control_parameters & | param | ||
| ) |
Definition at line 534 of file rocstar_driver.C.
References Control_parameters::communicator, Coupling::Interrupt(), and Control_parameters::myRank.
Referenced by rocstar_driver().


| COM_EXTERN_MODULE | ( | Rocin | ) |
| COM_EXTERN_MODULE | ( | Rocout | ) |
| Coupling* create_coupling | ( | Control_parameters & | param, |
| const RocmanControl_parameters & | rocman_param | ||
| ) |
Definition at line 95 of file rocstar_driver.C.
References Control_parameters::burn_module, COM_assertion_msg, COM_LOAD_MODULE_STATIC_DYNAMIC, Control_parameters::communicator, Control_parameters::coupling_scheme, Control_parameters::fluid_module, and Control_parameters::solid_module.
Referenced by rocstar_driver().

| void debug_int_print | ( | const std::string | str, |
| int | pane, | ||
| int | pe, | ||
| MPI_Comm | comm, | ||
| const char * | memo | ||
| ) |
Definition at line 918 of file rocstar_driver.C.
References COM_get_array(), COMMPI_Comm_rank(), and i.

| void debug_print | ( | const std::string | str, |
| int | pane, | ||
| int | pe, | ||
| MPI_Comm | comm, | ||
| const char * | memo | ||
| ) |
Definition at line 904 of file rocstar_driver.C.
References COM_get_array(), COMMPI_Comm_rank(), and i.

| double get_restart_time | ( | const string & | restart_file | ) |
Definition at line 72 of file rocstar_driver.C.
References cimg_library::cimg::fclose(), and cimg_library::cimg::fopen().
Referenced by Control_parameters::read().


| void init_profiling | ( | Control_parameters & | param, |
| int | comm_rank | ||
| ) |
Definition at line 835 of file rocstar_driver.C.
References COMMPI_Comm_size(), Control_parameters::communicator, Control_parameters::controlVerb, Control_parameters::current_time, d, cimg_library::cimg::fclose(), cimg_library::cimg::fopen(), i, MPI_COMM_WORLD, Control_parameters::timingDataDir, and Control_parameters::timingDataFile.
Referenced by Control_parameters::read().


| bool reached_restartdump_time | ( | Control_parameters & | param | ) |
Definition at line 519 of file rocstar_driver.C.
References Control_parameters::current_time, Control_parameters::iOutput, MAN_DEBUG, Control_parameters::myRank, Control_parameters::outputIntervalTime, and Control_parameters::time_step.
Referenced by rocstar_driver().

| bool reached_simulation_time | ( | const Control_parameters & | param | ) |
Definition at line 477 of file rocstar_driver.C.
References Control_parameters::communicator, Control_parameters::controlVerb, Control_parameters::cur_step, Control_parameters::current_dump, Control_parameters::current_time, MAN_DEBUG, Control_parameters::maxNumDumps, Control_parameters::maxNumTimeSteps, Control_parameters::maxwalltime, Control_parameters::myRank, Control_parameters::simue_time, and Control_parameters::startTime.
Referenced by rocstar_driver().

| bool reached_visdump_time | ( | const Control_parameters & | param | ) |
Definition at line 530 of file rocstar_driver.C.
Referenced by rocstar_driver().

| void rocstar_driver | ( | int | verb, |
| int | remeshed, | ||
| bool | debug | ||
| ) |
Definition at line 562 of file rocstar_driver.C.
References Coupling::check_convergence(), check_for_interrupt(), COM_print_profile(), COM_set_debug(), COM_set_profiling(), COM_set_verbose(), COM_UNLOAD_MODULE_STATIC_DYNAMIC, Control_parameters::communicator, Control_parameters::controlDebug, Control_parameters::controlVerb, create_coupling(), Control_parameters::cur_step, Control_parameters::current_dump, Control_parameters::current_time, Coupling::finalize(), RocBlas::init(), Coupling::init_convergence(), Coupling::initialize(), Control_parameters::LastOutputStep, Control_parameters::LastOutputTime, MAN_DEBUG, Control_parameters::maxNumPredCorrCycles, Control_parameters::maxNumTimeSteps, min(), MPI_COMM_WORLD, Control_parameters::myRank, Control_parameters::output_module, Coupling::output_restart_files(), Coupling::output_visualization_files(), Control_parameters::print(), RocmanControl_parameters::print(), Coupling::ProcessInterrupt(), reached_restartdump_time(), reached_simulation_time(), reached_visdump_time(), Control_parameters::read(), RocmanControl_parameters::read(), Coupling::read_restart_info(), RocmanControl_parameters::remeshed, Coupling::restart_at_time(), Coupling::run(), Coupling::schedule(), cimg_library::cimg::strcasecmp(), Control_parameters::time_step, Control_parameters::timingDataFile, Coupling::update_distances(), Coupling::update_integrals(), Coupling::write_restart_info(), and Control_parameters::zoomFactor.

| void RocstarShutdown | ( | int | status = 0 | ) |
Definition at line 59 of file rocstar_driver.C.
References COM_finalize().
Referenced by Coupling::Interrupt(), and Coupling::ProcessInterrupt().


| int man_verbose = 1 |
Definition at line 55 of file rocstar_driver.C.
Referenced by Agent::check_convergence_help(), RocmanControl_parameters::read(), Agent::read_by_control_file(), read_file(), FluidPropagateSurface::run(), and SolidPropagateSurface_ALE::run().
 1.8.5
1.8.5