 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
#include <Coupling.h>
Public Member Functions | |
| Control_parameters () | |
| void | read () |
| void | print () |
| void | update_communicator () |
| void | update_start_time (int step, double t) |
Public Attributes | |
| char | coupling_scheme [MAXLEN] |
| char | fluid_module [MAXLEN] |
| char | solid_module [MAXLEN] |
| char | burn_module [MAXLEN] |
| char | output_module [MAXLEN] |
| MPI_Comm | communicator |
| double | simue_time |
| double | init_time |
| double | current_time |
| double | time_step |
| double | maxwalltime |
| int | maxNumDumps |
| int | current_dump |
| int | maxNumPredCorrCycles |
| int | maxNumTimeSteps |
| double | outputIntervalTime |
| double | zoomFactor |
| double | tolerTract |
| double | tolerVelo |
| double | tolerMass |
| double | tolerDisp |
| char | timingDataDir [MAXLEN] |
| std::string | timingDataFile |
| int | cur_step |
| double | LastOutputTime |
| int | LastOutputStep |
| int | InterruptFlag |
| int | AutoRestart |
| int | controlVerb |
| bool | controlDebug |
| int | iOutput |
| int | myRank |
| double | startTime |
Definition at line 43 of file Coupling.h.
Definition at line 166 of file rocstar_driver.C.
References AutoRestart, communicator, controlVerb, cur_step, current_dump, InterruptFlag, max(), maxNumDumps, maxNumPredCorrCycles, maxNumTimeSteps, maxwalltime, MPI_COMM_WORLD, output_module, simue_time, timingDataDir, tolerDisp, tolerMass, tolerTract, tolerVelo, and zoomFactor.

| void print | ( | void | ) |
Definition at line 296 of file rocstar_driver.C.
References AutoRestart, coupling_scheme, current_time, maxNumDumps, maxNumPredCorrCycles, maxNumTimeSteps, maxwalltime, outputIntervalTime, simue_time, time_step, timingDataDir, timingDataFile, tolerDisp, tolerMass, tolerTract, tolerVelo, and zoomFactor.
Referenced by rocstar_driver().

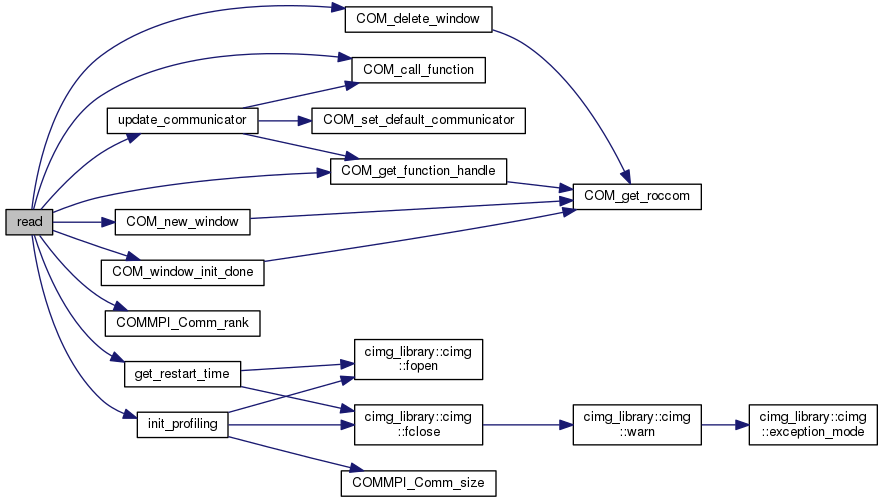
| void read | ( | ) |
Definition at line 187 of file rocstar_driver.C.
References AutoRestart, burn_module, COM_BOOL_ATTRIBUTE, COM_call_function(), COM_delete_window(), COM_DOUBLE_ATTRIBUTE, COM_get_function_handle(), COM_INT_ATTRIBUTE, COM_LOAD_MODULE_STATIC_DYNAMIC, COM_new_window(), COM_STRING_ATTRIBUTE, COM_window_init_done(), COMMPI_Comm_rank(), communicator, coupling_scheme, current_time, fluid_module, get_restart_time(), init_profiling(), init_time, iOutput, MAN_DEBUG, maxNumDumps, maxNumPredCorrCycles, maxNumTimeSteps, maxwalltime, MPI_COMM_WORLD, myRank, output_module, outputIntervalTime, simue_time, solid_module, startTime, time_step, timingDataDir, tolerDisp, tolerMass, tolerTract, tolerVelo, update_communicator(), and zoomFactor.
Referenced by rocstar_driver().

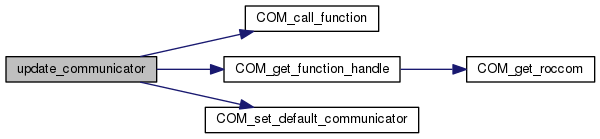
| void update_communicator | ( | ) |
Definition at line 287 of file rocstar_driver.C.
References COM_call_function(), COM_get_function_handle(), COM_set_default_communicator(), and communicator.
Referenced by read().

| void update_start_time | ( | int | step, |
| double | t | ||
| ) |
Definition at line 321 of file rocstar_driver.C.
References cur_step, current_time, iOutput, LastOutputStep, LastOutputTime, and outputIntervalTime.
Referenced by Coupling::read_restart_info(), and Coupling::restart_at_time().

| int AutoRestart |
Definition at line 79 of file Coupling.h.
Referenced by Control_parameters(), print(), and read().
| char burn_module[MAXLEN] |
Definition at line 48 of file Coupling.h.
Referenced by BurnAgent::BurnAgent(), create_coupling(), and read().
| MPI_Comm communicator |
Definition at line 51 of file Coupling.h.
Referenced by Coupling::baseInit(), check_for_interrupt(), Control_parameters(), create_coupling(), init_profiling(), reached_simulation_time(), read(), rocstar_driver(), and update_communicator().
| bool controlDebug |
Definition at line 82 of file Coupling.h.
Referenced by rocstar_driver().
| int controlVerb |
Definition at line 81 of file Coupling.h.
Referenced by Control_parameters(), init_profiling(), reached_simulation_time(), and rocstar_driver().
| char coupling_scheme[MAXLEN] |
Definition at line 45 of file Coupling.h.
Referenced by create_coupling(), print(), and read().
| int cur_step |
Definition at line 74 of file Coupling.h.
Referenced by Control_parameters(), Coupling::Interrupt(), Coupling::ProcessInterrupt(), reached_simulation_time(), rocstar_driver(), and update_start_time().
| int current_dump |
Definition at line 58 of file Coupling.h.
Referenced by Control_parameters(), reached_simulation_time(), and rocstar_driver().
| double current_time |
Definition at line 54 of file Coupling.h.
Referenced by _load_rocface(), Agent::Agent(), Coupling::baseInit(), init_profiling(), Coupling::initialize(), Coupling::Interrupt(), print(), Coupling::ProcessInterrupt(), reached_restartdump_time(), reached_simulation_time(), read(), Coupling::read_restart_info(), rocstar_driver(), and update_start_time().
| char fluid_module[MAXLEN] |
Definition at line 46 of file Coupling.h.
Referenced by create_coupling(), and read().
| double init_time |
Definition at line 53 of file Coupling.h.
Referenced by Coupling::new_start(), read(), and CopyBflagFromBurn::run().
| int InterruptFlag |
Definition at line 78 of file Coupling.h.
Referenced by Control_parameters(), Coupling::Interrupt(), and Coupling::ProcessInterrupt().
| int iOutput |
Definition at line 85 of file Coupling.h.
Referenced by reached_restartdump_time(), read(), and update_start_time().
| int LastOutputStep |
Definition at line 77 of file Coupling.h.
Referenced by Coupling::Interrupt(), Coupling::ProcessInterrupt(), rocstar_driver(), and update_start_time().
| double LastOutputTime |
Definition at line 76 of file Coupling.h.
Referenced by Coupling::Interrupt(), Coupling::ProcessInterrupt(), rocstar_driver(), and update_start_time().
| int maxNumDumps |
Definition at line 57 of file Coupling.h.
Referenced by Control_parameters(), print(), reached_simulation_time(), and read().
| int maxNumPredCorrCycles |
Definition at line 60 of file Coupling.h.
Referenced by Control_parameters(), print(), read(), and rocstar_driver().
| int maxNumTimeSteps |
Definition at line 61 of file Coupling.h.
Referenced by Control_parameters(), print(), Coupling::ProcessInterrupt(), reached_simulation_time(), read(), and rocstar_driver().
| double maxwalltime |
Definition at line 56 of file Coupling.h.
Referenced by Control_parameters(), print(), reached_simulation_time(), and read().
| int myRank |
Definition at line 86 of file Coupling.h.
Referenced by check_for_interrupt(), Coupling::Interrupt(), Coupling::ProcessInterrupt(), reached_restartdump_time(), reached_simulation_time(), read(), and rocstar_driver().
| char output_module[MAXLEN] |
Definition at line 49 of file Coupling.h.
Referenced by Control_parameters(), read(), and rocstar_driver().
| double outputIntervalTime |
Definition at line 63 of file Coupling.h.
Referenced by print(), Coupling::ProcessInterrupt(), reached_restartdump_time(), read(), and update_start_time().
| double simue_time |
Definition at line 52 of file Coupling.h.
Referenced by Control_parameters(), print(), reached_simulation_time(), and read().
| char solid_module[MAXLEN] |
Definition at line 47 of file Coupling.h.
Referenced by create_coupling(), and read().
| double startTime |
Definition at line 87 of file Coupling.h.
Referenced by reached_simulation_time(), and read().
| double time_step |
Definition at line 55 of file Coupling.h.
Referenced by Coupling::initialize(), print(), reached_restartdump_time(), read(), and rocstar_driver().
| char timingDataDir[MAXLEN] |
Definition at line 71 of file Coupling.h.
Referenced by Control_parameters(), init_profiling(), print(), and read().
| std::string timingDataFile |
Definition at line 72 of file Coupling.h.
Referenced by init_profiling(), print(), and rocstar_driver().
| double tolerDisp |
Definition at line 69 of file Coupling.h.
Referenced by Control_parameters(), print(), and read().
| double tolerMass |
Definition at line 68 of file Coupling.h.
Referenced by Coupling::check_convergence(), Control_parameters(), print(), and read().
| double tolerTract |
Definition at line 66 of file Coupling.h.
Referenced by Coupling::check_convergence(), Control_parameters(), print(), and read().
| double tolerVelo |
Definition at line 67 of file Coupling.h.
Referenced by Coupling::check_convergence(), Control_parameters(), print(), and read().
| double zoomFactor |
Definition at line 64 of file Coupling.h.
Referenced by Control_parameters(), FluidBurnAlone::FluidBurnAlone(), print(), read(), and rocstar_driver().
 1.8.5
1.8.5