 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
#include <RayS3.h>
Public Member Functions | |
| RayS3 () | |
| RayS3 (const PointS3< FT > &sp, const PointS3< FT > &secondp) | |
| RayS3 (const PointS3< FT > &sp, const DirectionS3< FT > &d) | |
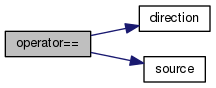
| bool | operator== (const RayS3< FT > &r) const |
| bool | operator!= (const RayS3< FT > &r) const |
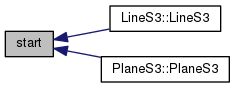
| PointS3< FT > | start () const |
| PointS3< FT > | source () const |
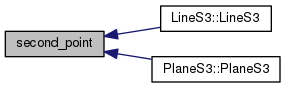
| PointS3< FT > | second_point () const |
| PointS3< FT > | point (int i) const |
| DirectionS3< FT > | direction () const |
| LineS3< FT > | supporting_line () const |
| RayS3 | opposite () const |
| RayS3 | transform (const Aff_transformationS3< FT > &t) const |
| bool | is_degenerate () const |
| bool | has_on (const PointS3< FT > &p) const |
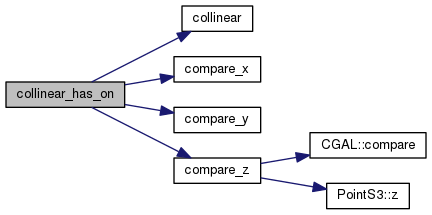
| bool | collinear_has_on (const PointS3< FT > &p) const |
Public Attributes | |
| PointS3< FT > | e0 |
| PointS3< FT > | e1 |
| RayS3 | ( | const PointS3< FT > & | sp, |
| const DirectionS3< FT > & | d | ||
| ) |
Definition at line 99 of file RayS3.h.
References DirectionS3< FT >::vector().

|
inline |
Definition at line 200 of file RayS3.h.
References CGAL_kernel_exactness_precondition, collinear(), compare_x(), compare_y(), compare_z(), and EQUAL.
|
inline |
Definition at line 155 of file RayS3.h.
Referenced by RayS3< FT >::operator==().

| bool has_on | ( | const PointS3< FT > & | p | ) | const |
Definition at line 182 of file RayS3.h.
References collinear().

|
inline |
|
inline |
Definition at line 109 of file RayS3.h.
References RayS3< FT >::direction(), and RayS3< FT >::source().
|
inline |
Definition at line 169 of file RayS3.h.
| PointS3< FT > point | ( | int | i | ) | const |
| PointS3< FT > second_point | ( | ) | const |
Definition at line 133 of file RayS3.h.
Referenced by LineS3< FT >::LineS3(), and PlaneS3< FT >::PlaneS3().
| PointS3< FT > source | ( | ) | const |
Definition at line 128 of file RayS3.h.
Referenced by RayS3< FT >::operator==().

| PointS3< FT > start | ( | ) | const |
Definition at line 122 of file RayS3.h.
Referenced by LineS3< FT >::LineS3(), and PlaneS3< FT >::PlaneS3().
|
inline |
Definition at line 162 of file RayS3.h.
|
inline |
Definition at line 176 of file RayS3.h.
References Aff_transformationS3< FT >::transform().

 1.8.5
1.8.5