 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
#include <CGAL/predicates/kernel_ftC3.h>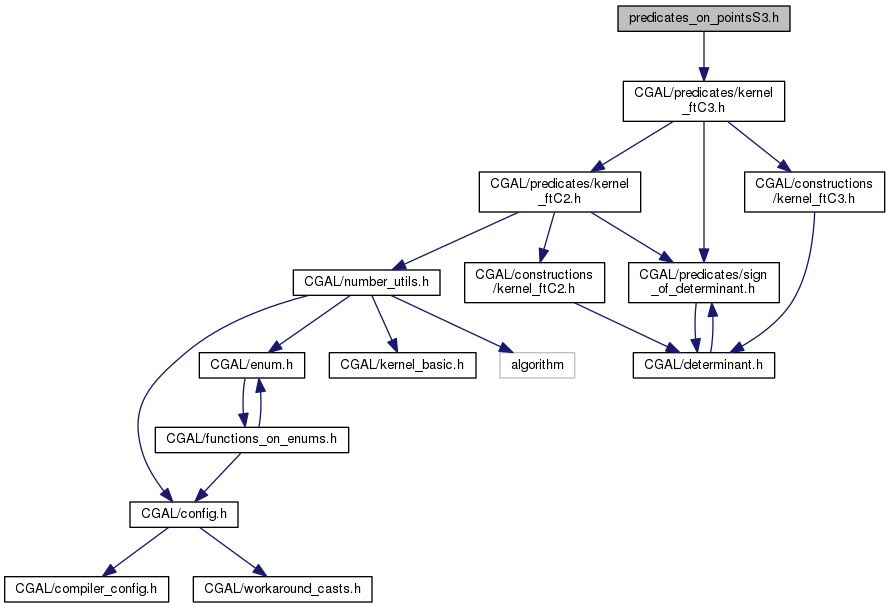
Go to the source code of this file.
Functions | |
| template<class FT > | |
| CGAL_BEGIN_NAMESPACE Comparison_result | compare_lexicographically_xyz (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| Comparison_result | compare_lexicographically_xy (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
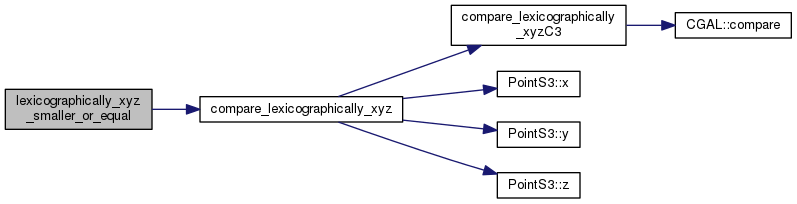
| bool | lexicographically_xyz_smaller_or_equal (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | lexicographically_xyz_smaller (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | lexicographically_xy_smaller (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | x_equal (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | y_equal (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | z_equal (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | equal_xy (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | equal_xyz (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| Comparison_result | compare_x (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| Comparison_result | compare_y (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| Comparison_result | compare_z (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | less_x (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | less_y (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | less_z (const PointS3< FT > &p, const PointS3< FT > &q) |
| template<class FT > | |
| bool | collinear (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r) |
| template<class FT > | |
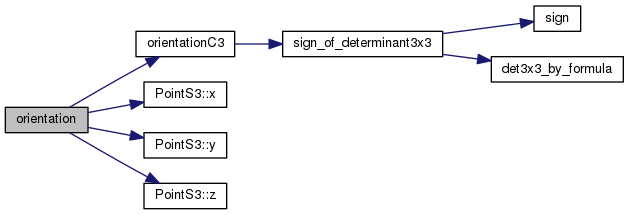
| Orientation | orientation (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r, const PointS3< FT > &s) |
| template<class FT > | |
| bool | coplanar (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r, const PointS3< FT > &s) |
| template<class FT > | |
| bool | are_positive_oriented (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r, const PointS3< FT > &s) |
| template<class FT > | |
| bool | are_negative_oriented (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r, const PointS3< FT > &s) |
| template<class FT > | |
| bool | are_ordered_along_line (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r) |
| template<class FT > | |
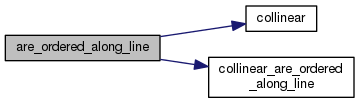
| bool | collinear_are_ordered_along_line (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r) |
| template<class FT > | |
| bool | are_strictly_ordered_along_line (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r) |
| template<class FT > | |
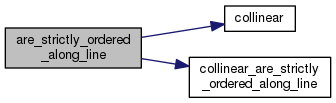
| bool | collinear_are_strictly_ordered_along_line (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r) |
| template<class FT > | |
| Orientation | coplanar_orientation (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r, const PointS3< FT > &s) |
| template<class FT > | |
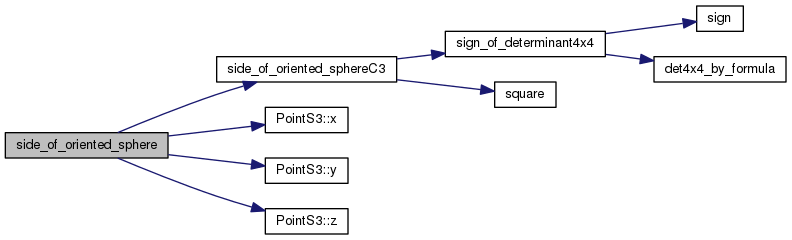
| Oriented_side | side_of_oriented_sphere (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r, const PointS3< FT > &s, const PointS3< FT > &test) |
| template<class FT > | |
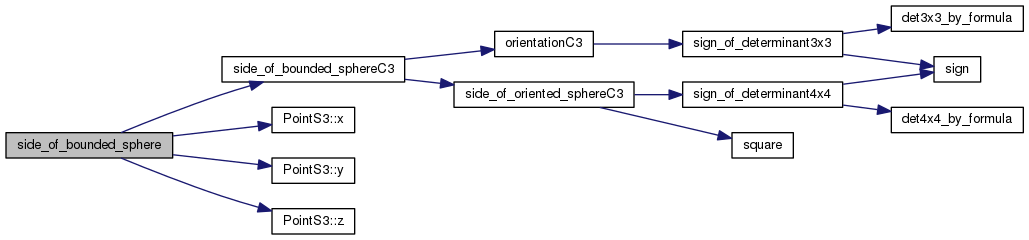
| Bounded_side | side_of_bounded_sphere (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r, const PointS3< FT > &s, const PointS3< FT > &test) |
|
inline |
Definition at line 210 of file predicates_on_pointsS3.h.
References NEGATIVE, and orientation().

|
inline |
Definition at line 221 of file predicates_on_pointsS3.h.
References collinear(), and collinear_are_ordered_along_line().
|
inline |
Definition at line 199 of file predicates_on_pointsS3.h.
References orientation(), and POSITIVE.

|
inline |
Definition at line 246 of file predicates_on_pointsS3.h.
References collinear(), and collinear_are_strictly_ordered_along_line().
Definition at line 162 of file predicates_on_pointsS3.h.
References collinearC3(), PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
|
inline |
Definition at line 232 of file predicates_on_pointsS3.h.
References CGAL_kernel_exactness_precondition, collinear(), collinear_are_ordered_along_lineC3(), PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
|
inline |
Definition at line 259 of file predicates_on_pointsS3.h.
References CGAL_kernel_exactness_precondition, collinear(), collinear_are_strictly_ordered_along_lineC3(), PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
| Comparison_result compare_lexicographically_xy | ( | const PointS3< FT > & | p, |
| const PointS3< FT > & | q | ||
| ) |
Definition at line 68 of file predicates_on_pointsS3.h.
References compare_lexicographically_xyC2(), PointS3< FT >::x(), and PointS3< FT >::y().
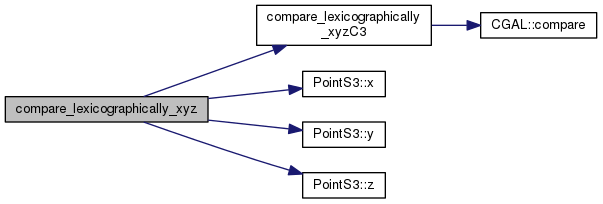
| CGAL_BEGIN_NAMESPACE Comparison_result compare_lexicographically_xyz | ( | const PointS3< FT > & | p, |
| const PointS3< FT > & | q | ||
| ) |
Definition at line 60 of file predicates_on_pointsS3.h.
References compare_lexicographically_xyzC3(), PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
Referenced by lexicographically_xyz_smaller(), lexicographically_xyz_smaller_or_equal(), and Compare_xyz::operator()().
|
inline |
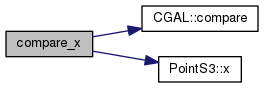
Definition at line 125 of file predicates_on_pointsS3.h.
References CGAL_NTS, CGAL::compare(), and PointS3< FT >::x().
|
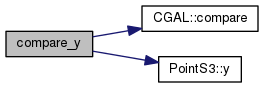
inline |
Definition at line 132 of file predicates_on_pointsS3.h.
References CGAL_NTS, CGAL::compare(), and PointS3< FT >::y().
|
inline |
Definition at line 139 of file predicates_on_pointsS3.h.
References CGAL_NTS, CGAL::compare(), and PointS3< FT >::z().
Referenced by RayS3< FT >::collinear_has_on(), and Compare_z::operator()().
|
inline |
Definition at line 188 of file predicates_on_pointsS3.h.
References COLLINEAR, and orientation().
Referenced by coplanar_orientation(), and Coplanar::operator()().

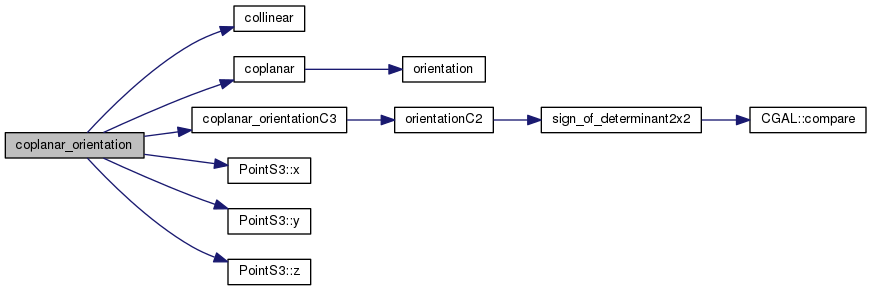
| Orientation coplanar_orientation | ( | const PointS3< FT > & | p, |
| const PointS3< FT > & | q, | ||
| const PointS3< FT > & | r, | ||
| const PointS3< FT > & | s | ||
| ) |
Definition at line 272 of file predicates_on_pointsS3.h.
References CGAL_kernel_exactness_precondition, collinear(), coplanar(), coplanar_orientationC3(), PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
Definition at line 113 of file predicates_on_pointsS3.h.
References PointS3< FT >::x(), and PointS3< FT >::y().
Definition at line 119 of file predicates_on_pointsS3.h.
References PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
Referenced by Equal_xyz::operator()().

Definition at line 145 of file predicates_on_pointsS3.h.
References PointS3< FT >::x().

Definition at line 151 of file predicates_on_pointsS3.h.
References PointS3< FT >::y().

Definition at line 157 of file predicates_on_pointsS3.h.
References PointS3< FT >::z().

Definition at line 88 of file predicates_on_pointsS3.h.
References compare_lexicographically_xy(), and SMALLER.

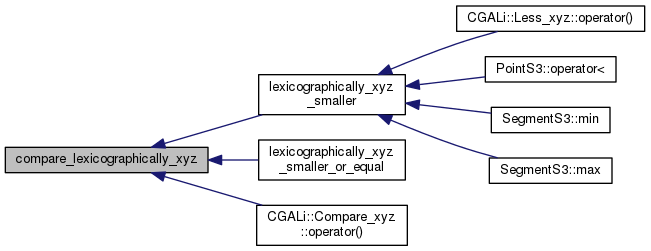
Definition at line 82 of file predicates_on_pointsS3.h.
References compare_lexicographically_xyz(), and SMALLER.
Referenced by SegmentS3< FT >::max(), SegmentS3< FT >::min(), Less_xyz::operator()(), and PointS3< FT >::operator<().
Definition at line 76 of file predicates_on_pointsS3.h.
References compare_lexicographically_xyz(), and LARGER.
|
inline |
Definition at line 174 of file predicates_on_pointsS3.h.
References orientationC3(), PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
| Bounded_side side_of_bounded_sphere | ( | const PointS3< FT > & | p, |
| const PointS3< FT > & | q, | ||
| const PointS3< FT > & | r, | ||
| const PointS3< FT > & | s, | ||
| const PointS3< FT > & | test | ||
| ) |
Definition at line 304 of file predicates_on_pointsS3.h.
References side_of_bounded_sphereC3(), PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
Referenced by Side_of_bounded_sphere::operator()().

| Oriented_side side_of_oriented_sphere | ( | const PointS3< FT > & | p, |
| const PointS3< FT > & | q, | ||
| const PointS3< FT > & | r, | ||
| const PointS3< FT > & | s, | ||
| const PointS3< FT > & | test | ||
| ) |
Definition at line 288 of file predicates_on_pointsS3.h.
References side_of_oriented_sphereC3(), PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
Referenced by Side_of_oriented_sphere::operator()().

Definition at line 94 of file predicates_on_pointsS3.h.
References PointS3< FT >::x().

Definition at line 101 of file predicates_on_pointsS3.h.
References PointS3< FT >::y().

Definition at line 107 of file predicates_on_pointsS3.h.
References PointS3< FT >::z().
Referenced by Equal_z::operator()().


 1.8.5
1.8.5