 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
#include <PlaneS3.h>
Public Member Functions | |
| PlaneS3 () | |
| PlaneS3 (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r) | |
| PlaneS3 (const PointS3< FT > &p, const DirectionS3< FT > &d) | |
| PlaneS3 (const PointS3< FT > &p, const VectorS3< FT > &v) | |
| PlaneS3 (const FT &a, const FT &b, const FT &c, const FT &d) | |
| PlaneS3 (const LineS3< FT > &l, const PointS3< FT > &p) | |
| PlaneS3 (const SegmentS3< FT > &s, const PointS3< FT > &p) | |
| PlaneS3 (RayS3< FT > &r, const PointS3< FT > &p) | |
| bool | operator== (const PlaneS3< FT > &p) const |
| bool | operator!= (const PlaneS3< FT > &p) const |
| const FT & | a () const |
| const FT & | b () const |
| const FT & | c () const |
| const FT & | d () const |
| LineS3< FT > | perpendicular_line (const PointS3< FT > &p) const |
| PlaneS3 | opposite () const |
| PointS3< FT > | point () const |
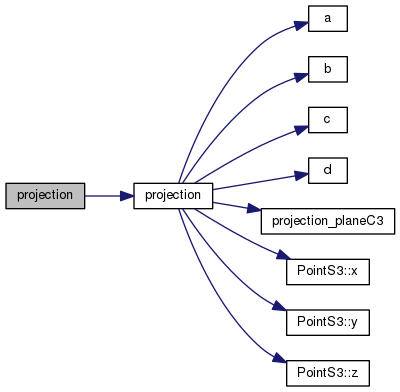
| PointS3< FT > | projection (const PointS3< FT > &p) const |
| VectorS3< FT > | orthogonal_vector () const |
| DirectionS3< FT > | orthogonal_direction () const |
| VectorS3< FT > | base1 () const |
| VectorS3< FT > | base2 () const |
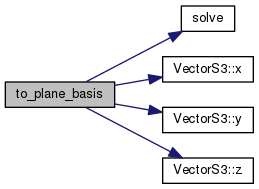
| PointS3< FT > | to_plane_basis (const PointS3< FT > &p) const |
| PointS2< FT > | to_2d (const PointS3< FT > &p) const |
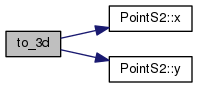
| PointS3< FT > | to_3d (const PointS2< FT > &p) const |
| PlaneS3 | transform (const Aff_transformationS3< FT > &t) const |
| Oriented_side | oriented_side (const PointS3< FT > &p) const |
| bool | has_on_boundary (const PointS3< FT > &p) const |
| bool | has_on_boundary (const LineS3< FT > &p) const |
| bool | has_on_positive_side (const PointS3< FT > &l) const |
| bool | has_on_negative_side (const PointS3< FT > &l) const |
| bool | is_degenerate () const |
| void | new_rep (const PointS3< FT > &p, const PointS3< FT > &q, const PointS3< FT > &r) |
| void | new_rep (const FT &a, const FT &b, const FT &c, const FT &d) |
Public Attributes | |
| FT | e0 |
| FT | e1 |
| FT | e2 |
| FT | e3 |
| CGAL_END_NAMESPACE CGAL_BEGIN_NAMESPACE PlaneS3 | ( | const PointS3< FT > & | p, |
| const PointS3< FT > & | q, | ||
| const PointS3< FT > & | r | ||
| ) |
Definition at line 169 of file PlaneS3.h.
| PlaneS3 | ( | const PointS3< FT > & | p, |
| const DirectionS3< FT > & | d | ||
| ) |
Definition at line 175 of file PlaneS3.h.
References DirectionS3< FT >::dx(), DirectionS3< FT >::dy(), DirectionS3< FT >::dz(), PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().

Definition at line 183 of file PlaneS3.h.
References VectorS3< FT >::x(), PointS3< FT >::x(), VectorS3< FT >::y(), PointS3< FT >::y(), VectorS3< FT >::z(), and PointS3< FT >::z().
| PlaneS3 | ( | const FT & | a, |
| const FT & | b, | ||
| const FT & | c, | ||
| const FT & | d | ||
| ) |
Definition at line 187 of file PlaneS3.h.
Definition at line 191 of file PlaneS3.h.
References LineS3< FT >::direction(), and LineS3< FT >::point().
Definition at line 195 of file PlaneS3.h.
References SegmentS3< FT >::end(), and SegmentS3< FT >::start().
Definition at line 199 of file PlaneS3.h.
References RayS3< FT >::second_point(), and RayS3< FT >::start().

| const FT & a | ( | ) | const |
Definition at line 219 of file PlaneS3.h.
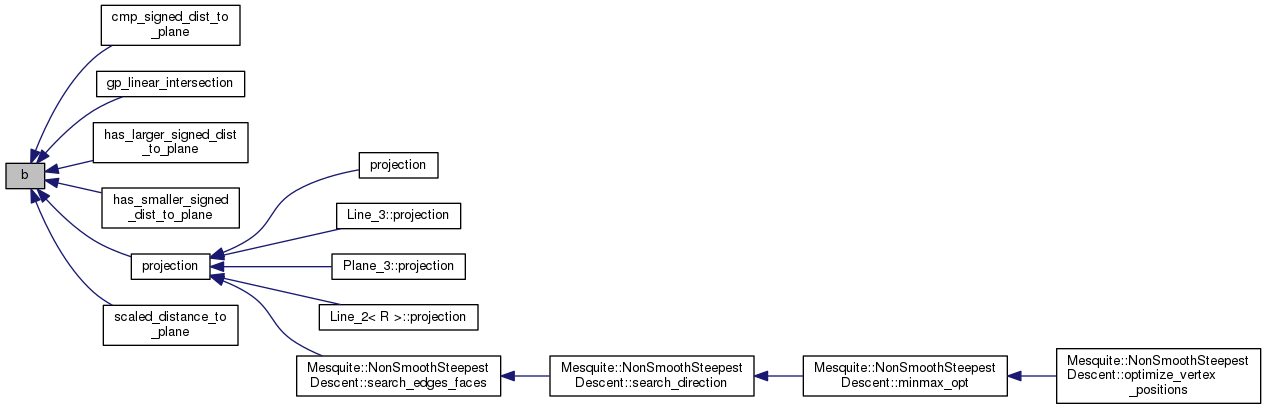
Referenced by cmp_signed_dist_to_plane(), gp_linear_intersection(), has_larger_signed_dist_to_plane(), has_smaller_signed_dist_to_plane(), projection(), and scaled_distance_to_plane().

| const FT & b | ( | ) | const |
Definition at line 224 of file PlaneS3.h.
Referenced by cmp_signed_dist_to_plane(), gp_linear_intersection(), has_larger_signed_dist_to_plane(), has_smaller_signed_dist_to_plane(), projection(), and scaled_distance_to_plane().
| VectorS3< FT > base1 | ( | ) | const |
Definition at line 269 of file PlaneS3.h.
| VectorS3< FT > base2 | ( | ) | const |
Definition at line 285 of file PlaneS3.h.
| const FT & c | ( | ) | const |
Definition at line 229 of file PlaneS3.h.
Referenced by cmp_signed_dist_to_plane(), gp_linear_intersection(), has_larger_signed_dist_to_plane(), has_smaller_signed_dist_to_plane(), projection(), and scaled_distance_to_plane().

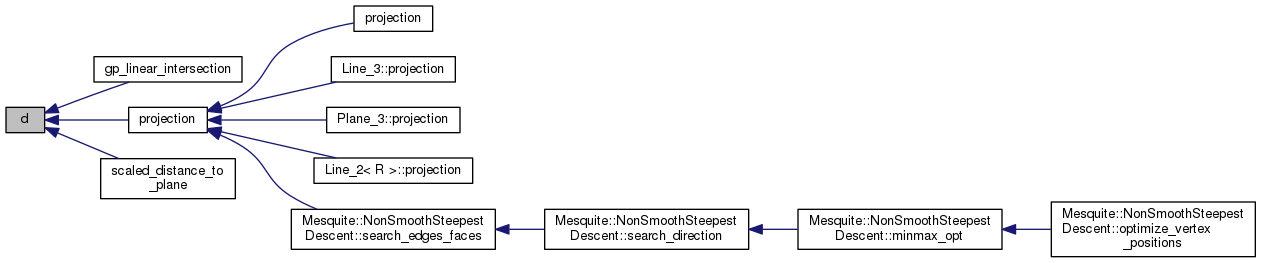
| const FT & d | ( | ) | const |
Definition at line 234 of file PlaneS3.h.
Referenced by gp_linear_intersection(), projection(), and scaled_distance_to_plane().
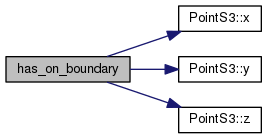
| bool has_on_boundary | ( | const PointS3< FT > & | p | ) | const |
Definition at line 380 of file PlaneS3.h.
References d, PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
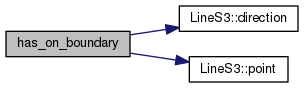
| bool has_on_boundary | ( | const LineS3< FT > & | p | ) | const |
Definition at line 386 of file PlaneS3.h.
References LineS3< FT >::direction(), and LineS3< FT >::point().
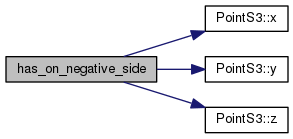
| bool has_on_negative_side | ( | const PointS3< FT > & | l | ) | const |
Definition at line 399 of file PlaneS3.h.
References d, PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
| bool has_on_positive_side | ( | const PointS3< FT > & | l | ) | const |
Definition at line 393 of file PlaneS3.h.
References d, PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
Definition at line 143 of file PlaneS3.h.
References PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
|
inline |
| bool operator!= | ( | const PlaneS3< FT > & | p | ) | const |
| bool operator== | ( | const PlaneS3< FT > & | p | ) | const |
Definition at line 204 of file PlaneS3.h.
References PlaneS3< FT >::orthogonal_direction(), and PlaneS3< FT >::point().
| PlaneS3< FT > opposite | ( | ) | const |
| Oriented_side oriented_side | ( | const PointS3< FT > & | p | ) | const |
Definition at line 376 of file PlaneS3.h.
References CGAL_NTS, d, sign(), PointS3< FT >::x(), PointS3< FT >::y(), and PointS3< FT >::z().
| DirectionS3< FT > orthogonal_direction | ( | ) | const |
Definition at line 263 of file PlaneS3.h.
Referenced by PlaneS3< FT >::operator==().

| VectorS3< FT > orthogonal_vector | ( | ) | const |
Definition at line 256 of file PlaneS3.h.
Definition at line 351 of file PlaneS3.h.
| PointS3< FT > point | ( | ) | const |
Definition at line 238 of file PlaneS3.h.
References d.
Referenced by PlaneS3< FT >::operator==().

Definition at line 250 of file PlaneS3.h.
References projection().
Definition at line 324 of file PlaneS3.h.
References solve(), VectorS3< FT >::x(), VectorS3< FT >::y(), and VectorS3< FT >::z().

Definition at line 343 of file PlaneS3.h.
References PointS2< FT >::x(), and PointS2< FT >::y().
Definition at line 306 of file PlaneS3.h.
References solve(), VectorS3< FT >::x(), VectorS3< FT >::y(), and VectorS3< FT >::z().
| PlaneS3< FT > transform | ( | const Aff_transformationS3< FT > & | t | ) | const |
Definition at line 361 of file PlaneS3.h.
References Aff_transformationS3< FT >::is_even(), Aff_transformationS3< FT >::transform(), and Aff_transformationS3< FT >::transpose().
Referenced by Aff_transformationS3< FT >::transform().


 1.8.5
1.8.5