|
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
#include "FaceOffset_3.h"#include "../Rocblas/include/Rocblas.h"#include "../Rocsurf/include/Rocsurf.h"#include <algorithm>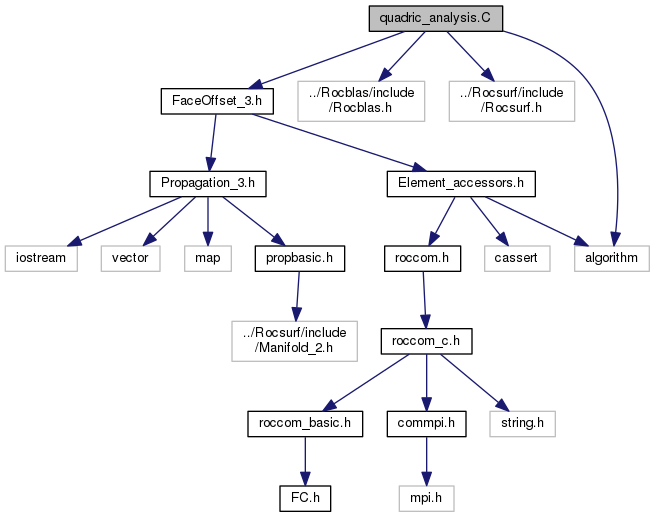
Go to the source code of this file.
Functions | |
| double | SQR (double x) |
| void | dsytrd3 (double A[3][3], double Q[3][3], double d[3], double e[2]) |
| int | dsyevq3 (double A[3][3], double Q[3][3], double w[3]) |
| int dsyevq3 | ( | double | A[3][3], |
| double | Q[3][3], | ||
| double | w[3] | ||
| ) |
Definition at line 462 of file quadric_analysis.C.
References dsytrd3(), i, k, s, SQR(), and sqrt().

| void dsytrd3 | ( | double | A[3][3], |
| double | Q[3][3], | ||
| double | d[3], | ||
| double | e[2] | ||
| ) |
|
inline |
Definition at line 383 of file quadric_analysis.C.
 1.8.5
1.8.5