 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
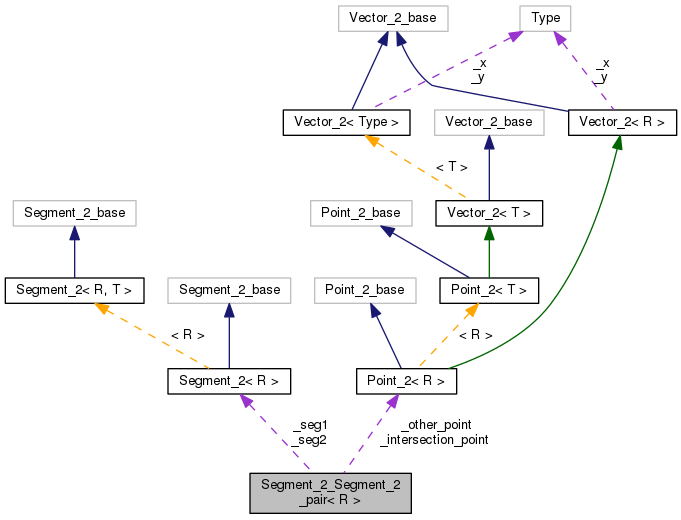
#include <Segment_2_Segment_2_intersection.h>
Public Types | |
| enum | Intersection_results { NO, POINT, SEGMENT } |
Public Member Functions | |
| Segment_2_Segment_2_pair () | |
| Segment_2_Segment_2_pair (Segment_2< R > const *seg1, Segment_2< R > const *seg2) | |
| ~Segment_2_Segment_2_pair () | |
| Intersection_results | intersection_type () const |
| bool | intersection (Point_2< R > &result) const |
| bool | intersection (Segment_2< R > &result) const |
Protected Attributes | |
| Segment_2< R > const * | _seg1 |
| Segment_2< R > const * | _seg2 |
| bool | _known |
| Intersection_results | _result |
| Point_2< R > | _intersection_point |
| Point_2< R > | _other_point |
Definition at line 61 of file Segment_2_Segment_2_intersection.h.
| enum Intersection_results |
| Enumerator | |
|---|---|
| NO | |
| POINT | |
| SEGMENT | |
Definition at line 63 of file Segment_2_Segment_2_intersection.h.
Definition at line 437 of file Segment_2_Segment_2_intersection.h.
| Segment_2_Segment_2_pair | ( | Segment_2< R > const * | seg1, |
| Segment_2< R > const * | seg2 | ||
| ) |
Definition at line 445 of file Segment_2_Segment_2_intersection.h.
|
inline |
Definition at line 67 of file Segment_2_Segment_2_intersection.h.
| bool intersection | ( | Point_2< R > & | result | ) | const |
Definition at line 570 of file Segment_2_Segment_2_intersection.h.
| bool intersection | ( | Segment_2< R > & | result | ) | const |
Definition at line 582 of file Segment_2_Segment_2_intersection.h.
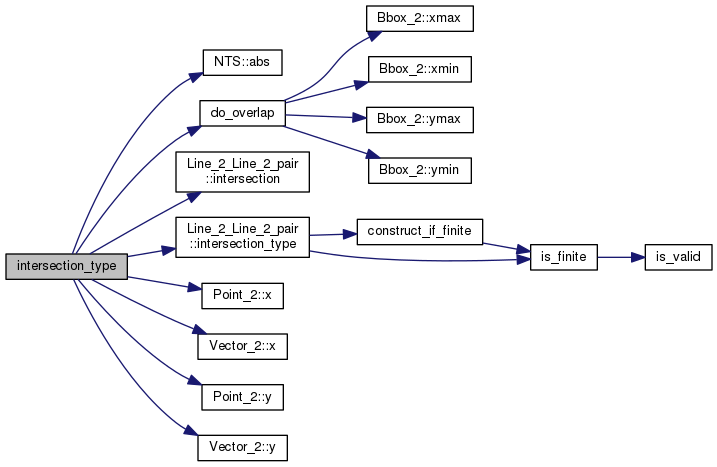
| Segment_2_Segment_2_pair< R >::Intersection_results intersection_type | ( | ) | const |
Definition at line 456 of file Segment_2_Segment_2_intersection.h.
References NTS::abs(), CGAL_NTS, do_overlap(), Line_2_Line_2_pair< R >::intersection(), Line_2_Line_2_pair< R >::intersection_type(), Point_2< T >::x(), Vector_2< Type >::x(), Point_2< T >::y(), and Vector_2< Type >::y().
|
mutableprotected |
Definition at line 190 of file Segment_2_Segment_2_intersection.h.
|
mutableprotected |
Definition at line 188 of file Segment_2_Segment_2_intersection.h.
|
mutableprotected |
Definition at line 190 of file Segment_2_Segment_2_intersection.h.
|
mutableprotected |
Definition at line 189 of file Segment_2_Segment_2_intersection.h.
|
protected |
Definition at line 186 of file Segment_2_Segment_2_intersection.h.
|
protected |
Definition at line 187 of file Segment_2_Segment_2_intersection.h.
 1.8.5
1.8.5