 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
#include <Aff_transformationS2.h>
Public Member Functions | |
| Rotation_repS2 () | |
| Rotation_repS2 (const FT &sinus, const FT &cosinus) | |
| Rotation_repS2 (const DirectionS2< FT > &d, const FT &eps_num, const FT &eps_den=FT(1)) | |
| ~Rotation_repS2 () | |
| PointS2< FT > | transform (const PointS2< FT > &p) const |
| VectorS2< FT > | transform (const VectorS2< FT > &v) const |
| DirectionS2< FT > | transform (const DirectionS2< FT > &d) const |
| Aff_transformationS2< FT > | inverse () const |
| Aff_transformationS2< FT > | operator* (const Aff_transformation_rep_baseS2< FT > &t) |
| Aff_transformationS2< FT > | compose (const Translation_repS2< FT > &t) const |
| virtual Aff_transformationS2< FT > | compose (const Rotation_repS2< FT > &t) const |
| virtual Aff_transformationS2< FT > | compose (const Scaling_repS2< FT > &t) const |
| virtual Aff_transformationS2< FT > | compose (const Aff_transformation_repS2< FT > &t) const |
| virtual bool | is_even () const |
| virtual FT | cartesian (int i, int j) const |
| virtual std::ostream & | print (std::ostream &os) const |
 Public Member Functions inherited from Aff_transformation_rep_baseS2< FT > Public Member Functions inherited from Aff_transformation_rep_baseS2< FT > | |
| virtual | ~Aff_transformation_rep_baseS2 () |
Private Attributes | |
| FT | _sinus |
| FT | _cosinus |
Friends | |
| class | Aff_transformation_repS2< FT > |
| class | Translation_repS2< FT > |
| class | Scaling_repS2< FT > |
Additional Inherited Members | |
| Protected Member Functions inherited from Leda_like_rep | |
| Leda_like_rep () | |
| virtual | ~Leda_like_rep () |
| Protected Attributes inherited from Leda_like_rep | |
| int | count |
Definition at line 74 of file Aff_transformationS2.h.
|
inline |
Definition at line 419 of file Aff_transformationS2.h.
|
inline |
Definition at line 422 of file Aff_transformationS2.h.
|
inline |
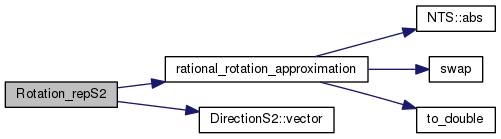
Definition at line 426 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, Rotation_repS2< FT >::_sinus, cos_num, denom, eps_den, eps_num, rational_rotation_approximation(), sin_num, and DirectionS2< FT >::vector().
|
inline |
Definition at line 445 of file Aff_transformationS2.h.
|
inlinevirtual |
Implements Aff_transformation_rep_baseS2< FT >.
Definition at line 537 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, and Rotation_repS2< FT >::_sinus.
|
inlinevirtual |
Implements Aff_transformation_rep_baseS2< FT >.
Definition at line 488 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, Rotation_repS2< FT >::_sinus, and Translation_repS2< FT >::_translationvector.
|
inlinevirtual |
Implements Aff_transformation_rep_baseS2< FT >.
Definition at line 501 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, Rotation_repS2< FT >::_sinus, and ROTATION.
|
inlinevirtual |
Implements Aff_transformation_rep_baseS2< FT >.
Definition at line 509 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, Scaling_repS2< FT >::_scalefactor, and Rotation_repS2< FT >::_sinus.
|
inlinevirtual |
Implements Aff_transformation_rep_baseS2< FT >.
Definition at line 519 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, Rotation_repS2< FT >::_sinus, Aff_transformation_repS2< FT >::t11, Aff_transformation_repS2< FT >::t12, Aff_transformation_repS2< FT >::t13, Aff_transformation_repS2< FT >::t21, Aff_transformation_repS2< FT >::t22, and Aff_transformation_repS2< FT >::t23.
|
inlinevirtual |
Implements Aff_transformation_rep_baseS2< FT >.
Definition at line 467 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, Rotation_repS2< FT >::_sinus, and ROTATION.
|
inlinevirtual |
Implements Aff_transformation_rep_baseS2< FT >.
Definition at line 532 of file Aff_transformationS2.h.
|
inlinevirtual |
Implements Aff_transformation_rep_baseS2< FT >.
Definition at line 482 of file Aff_transformationS2.h.
References Aff_transformation_rep_baseS2< FT >::compose().

|
inlinevirtual |
Definition at line 563 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, and Rotation_repS2< FT >::_sinus.
Implements Aff_transformation_rep_baseS2< FT >.
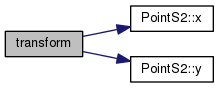
Definition at line 448 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, Rotation_repS2< FT >::_sinus, PointS2< FT >::x(), and PointS2< FT >::y().
Implements Aff_transformation_rep_baseS2< FT >.
Definition at line 454 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, Rotation_repS2< FT >::_sinus, VectorS2< FT >::x(), and VectorS2< FT >::y().

|
inlinevirtual |
Implements Aff_transformation_rep_baseS2< FT >.
Definition at line 460 of file Aff_transformationS2.h.
References Rotation_repS2< FT >::_cosinus, Rotation_repS2< FT >::_sinus, v, DirectionS2< FT >::vector(), VectorS2< FT >::x(), and VectorS2< FT >::y().
|
friend |
Definition at line 415 of file Aff_transformationS2.h.
|
friend |
Definition at line 417 of file Aff_transformationS2.h.
|
friend |
Definition at line 416 of file Aff_transformationS2.h.
|
private |
Definition at line 571 of file Aff_transformationS2.h.
Referenced by Rotation_repS2< FT >::cartesian(), Aff_transformation_repS2< FT >::compose(), Translation_repS2< FT >::compose(), Rotation_repS2< FT >::compose(), Scaling_repS2< FT >::compose(), Rotation_repS2< FT >::inverse(), Rotation_repS2< FT >::print(), Rotation_repS2< FT >::Rotation_repS2(), and Rotation_repS2< FT >::transform().
|
private |
Definition at line 570 of file Aff_transformationS2.h.
Referenced by Rotation_repS2< FT >::cartesian(), Aff_transformation_repS2< FT >::compose(), Translation_repS2< FT >::compose(), Rotation_repS2< FT >::compose(), Scaling_repS2< FT >::compose(), Rotation_repS2< FT >::inverse(), Rotation_repS2< FT >::print(), Rotation_repS2< FT >::Rotation_repS2(), and Rotation_repS2< FT >::transform().
 1.8.5
1.8.5