 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
Simple Block Structured Mesh object. More...
#include <BSMesh.H>
Public Member Functions | |
| BSExtent () | |
| BSExtent (const std::vector< std::vector< T > > &inextent) | |
| BSExtent (const std::vector< T > &inflatextent) | |
| BSExtent (const T *src, int nd=3) | |
| void | destroy () |
| void | Init (const std::vector< T > &inflatextent) |
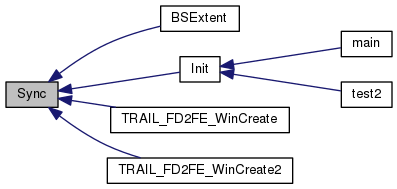
| void | Sync () |
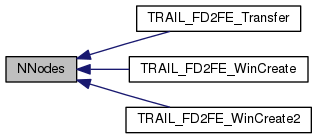
| T | NNodes () |
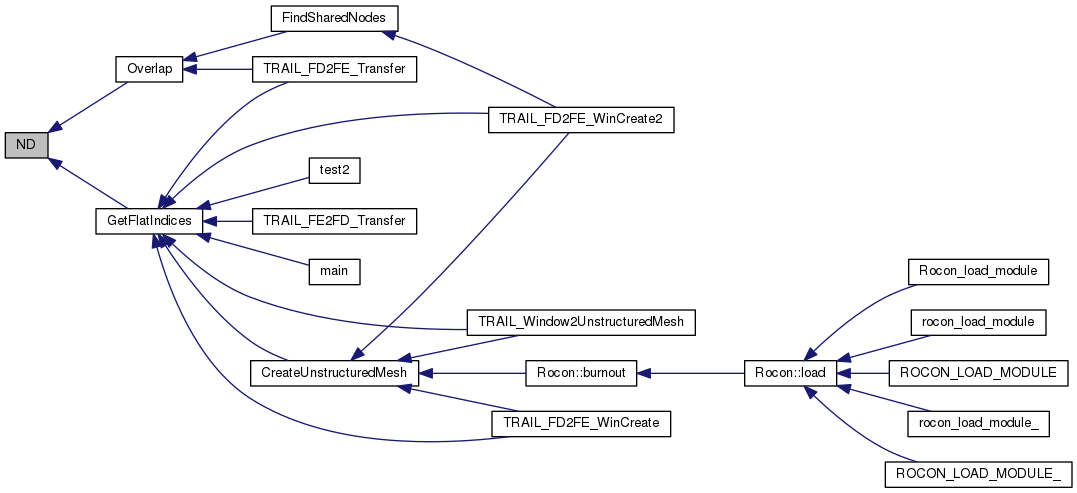
| int | ND () |
| void | Flatten (std::vector< T > &output) |
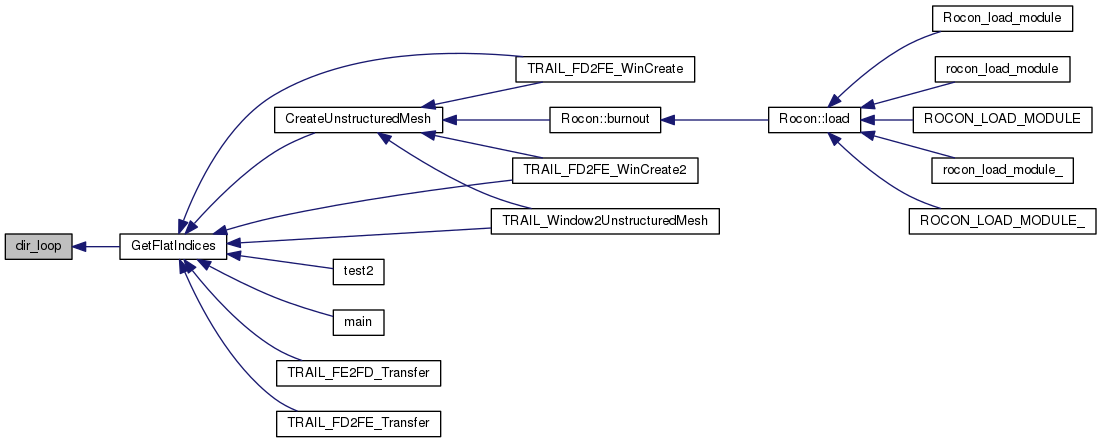
| void | dir_loop (int nd, T indoff, T plane, std::vector< T > &N, std::vector< T > &NP, const BSExtent< T > &inextent, std::vector< T > &indices) |
| void | GetFlatIndices (const BSExtent< T > &extent, std::vector< T > &indices) |
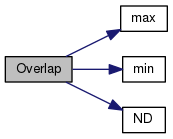
| void | Overlap (const BSExtent< T > &inextent, BSExtent< T > &outextent) |
| void | FindSharedNodes (std::vector< BSExtent< T > > &extent_pool, std::vector< BSExtent< T > > &shared_extents, std::vector< T > &neighbors) |
| T | NodeNum (std::vector< T > &index) |
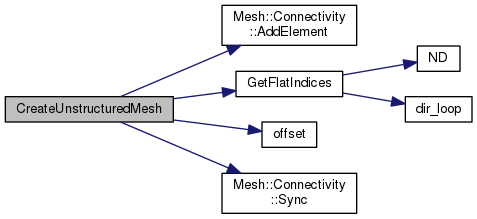
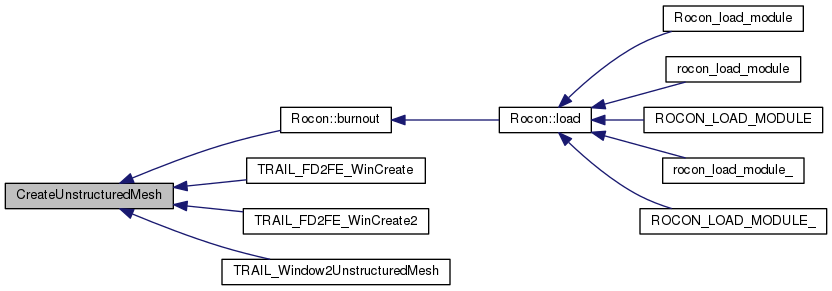
| void | CreateUnstructuredMesh (Connectivity &conn) |
Private Attributes | |
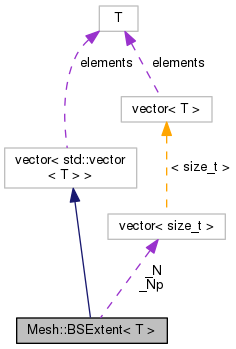
| size_t | _nd |
| std::vector< size_t > | _Np |
| std::vector< size_t > | _N |
Additional Inherited Members | |
 Public Attributes inherited from vector< T > Public Attributes inherited from vector< T > | |
| T | elements |
| STL member. More... | |
Simple Block Structured Mesh object.
Block structured mesh object holds irange, jrange, and krange. Elements are ordered in dictionary ordering of lower left node
|
inline |
Definition at line 23 of file BSMesh.H.
References Mesh::BSExtent< T >::_N, Mesh::BSExtent< T >::_nd, and Mesh::BSExtent< T >::_Np.
|
inline |
Definition at line 30 of file BSMesh.H.
References Mesh::BSExtent< T >::_nd, i, and Mesh::BSExtent< T >::Sync().

|
inline |
Definition at line 41 of file BSMesh.H.
References Mesh::BSExtent< T >::_nd, and Mesh::BSExtent< T >::Sync().

|
inline |
Definition at line 53 of file BSMesh.H.
References Mesh::BSExtent< T >::_nd, and Mesh::BSExtent< T >::Sync().

|
inline |
Definition at line 199 of file BSMesh.H.
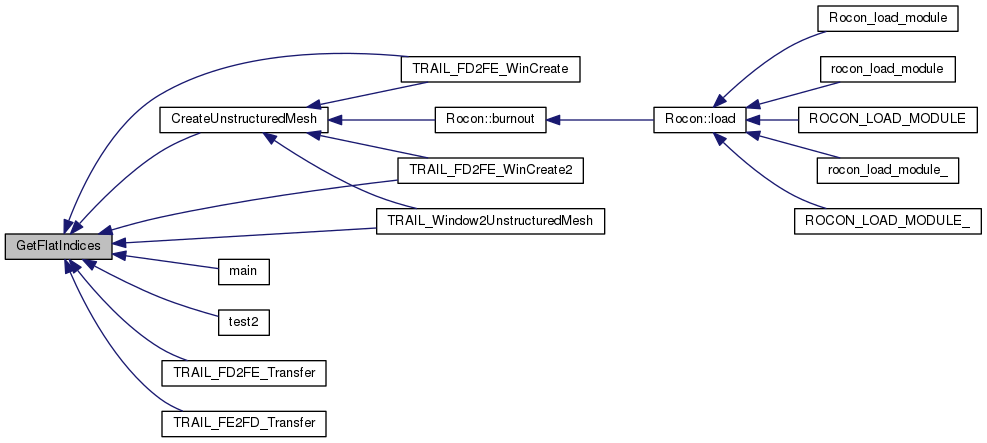
References Mesh::BSExtent< T >::_N, Mesh::BSExtent< T >::_nd, Mesh::Connectivity::AddElement(), Mesh::BSExtent< T >::GetFlatIndices(), i, offset(), and Mesh::Connectivity::Sync().
Referenced by Rocon::burnout(), TRAIL_FD2FE_WinCreate(), TRAIL_FD2FE_WinCreate2(), and TRAIL_Window2UnstructuredMesh().
|
inline |
Definition at line 65 of file BSMesh.H.
References Mesh::BSExtent< T >::_N, Mesh::BSExtent< T >::_nd, and Mesh::BSExtent< T >::_Np.
Referenced by Mesh::BSExtent< T >::Init().
|
inline |
Definition at line 121 of file BSMesh.H.
Referenced by Mesh::BSExtent< T >::GetFlatIndices().
|
inline |
Definition at line 174 of file BSMesh.H.
References Mesh::BSExtent< T >::Overlap().
Referenced by TRAIL_FD2FE_WinCreate2().

|
inline |
Definition at line 111 of file BSMesh.H.
Referenced by TRAIL_FD2FE_Transfer(), TRAIL_FD2FE_WinCreate(), and TRAIL_FD2FE_WinCreate2().
|
inline |
Definition at line 139 of file BSMesh.H.
References Mesh::BSExtent< T >::dir_loop(), and Mesh::BSExtent< T >::ND().
Referenced by Mesh::BSExtent< T >::CreateUnstructuredMesh(), main(), test2(), TRAIL_FD2FE_Transfer(), TRAIL_FD2FE_WinCreate(), TRAIL_FD2FE_WinCreate2(), TRAIL_FE2FD_Transfer(), and TRAIL_Window2UnstructuredMesh().
|
inline |
Definition at line 75 of file BSMesh.H.
References Mesh::BSExtent< T >::_nd, Mesh::BSExtent< T >::destroy(), and Mesh::BSExtent< T >::Sync().
Referenced by main(), and test2().
|
inline |
Definition at line 110 of file BSMesh.H.
Referenced by Mesh::BSExtent< T >::GetFlatIndices(), and Mesh::BSExtent< T >::Overlap().
|
inline |
Definition at line 101 of file BSMesh.H.
Referenced by TRAIL_FD2FE_Transfer(), TRAIL_FD2FE_WinCreate(), and TRAIL_FD2FE_WinCreate2().
|
inline |
Definition at line 193 of file BSMesh.H.
References Mesh::BSExtent< T >::_nd, Mesh::BSExtent< T >::_Np, and i.
Definition at line 152 of file BSMesh.H.
References i, j, max(), min(), and Mesh::BSExtent< T >::ND().
Referenced by Mesh::BSExtent< T >::FindSharedNodes(), and TRAIL_FD2FE_Transfer().

|
inline |
Definition at line 88 of file BSMesh.H.
References Mesh::BSExtent< T >::_N, Mesh::BSExtent< T >::_nd, Mesh::BSExtent< T >::_Np, and i.
Referenced by Mesh::BSExtent< T >::BSExtent(), Mesh::BSExtent< T >::Init(), TRAIL_FD2FE_WinCreate(), and TRAIL_FD2FE_WinCreate2().
|
private |
Definition at line 21 of file BSMesh.H.
Referenced by Mesh::BSExtent< T >::BSExtent(), Mesh::BSExtent< T >::CreateUnstructuredMesh(), Mesh::BSExtent< T >::destroy(), and Mesh::BSExtent< T >::Sync().
|
private |
Definition at line 19 of file BSMesh.H.
Referenced by Mesh::BSExtent< T >::BSExtent(), Mesh::BSExtent< T >::CreateUnstructuredMesh(), Mesh::BSExtent< T >::destroy(), Mesh::BSExtent< T >::Init(), Mesh::BSExtent< T >::NodeNum(), and Mesh::BSExtent< T >::Sync().
|
private |
Definition at line 20 of file BSMesh.H.
Referenced by Mesh::BSExtent< T >::BSExtent(), Mesh::BSExtent< T >::destroy(), Mesh::BSExtent< T >::NodeNum(), and Mesh::BSExtent< T >::Sync().
 1.8.5
1.8.5