 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
Classes | |
| class | Plane |
Public Types | |
| enum | { LEFT, RIGHT } |
| typedef std::back_insert_iterator < List_points > | back_iter |
Public Member Functions | |
| const Plane & | get_hs (int side) const |
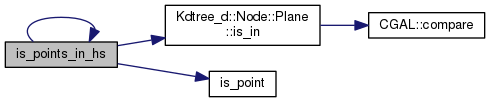
| bool | is_points_in_hs (const Plane &pl) const |
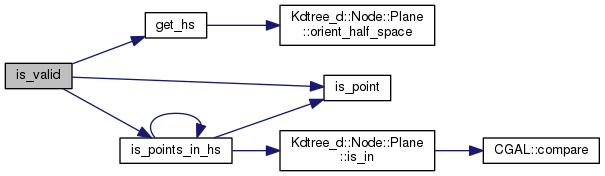
| bool | is_valid () const |
| void | dump (int depth) |
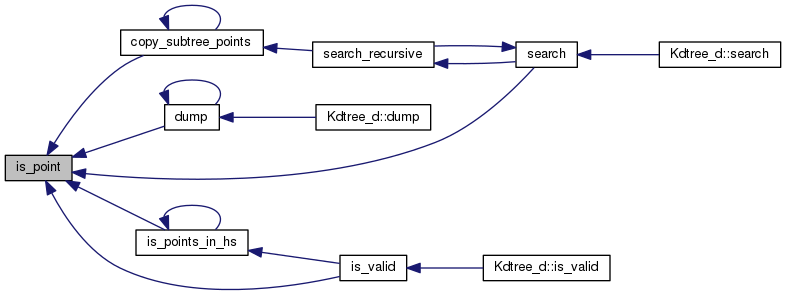
| bool | is_point () const |
| Node () | |
| ~Node () | |
| void | copy_subtree_points (back_iter &result, const Box &rect) |
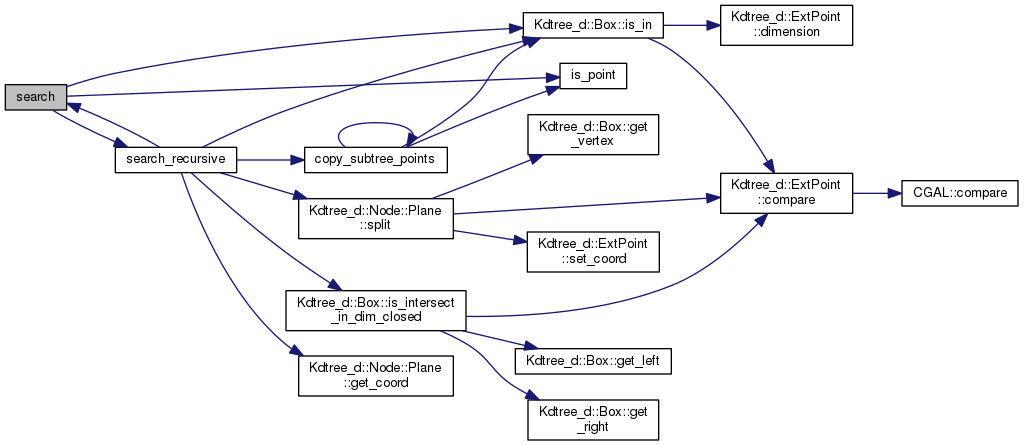
| void | search (std::back_insert_iterator< List_points > result, const Box &rect, Box ®ion) |
Static Public Member Functions | |
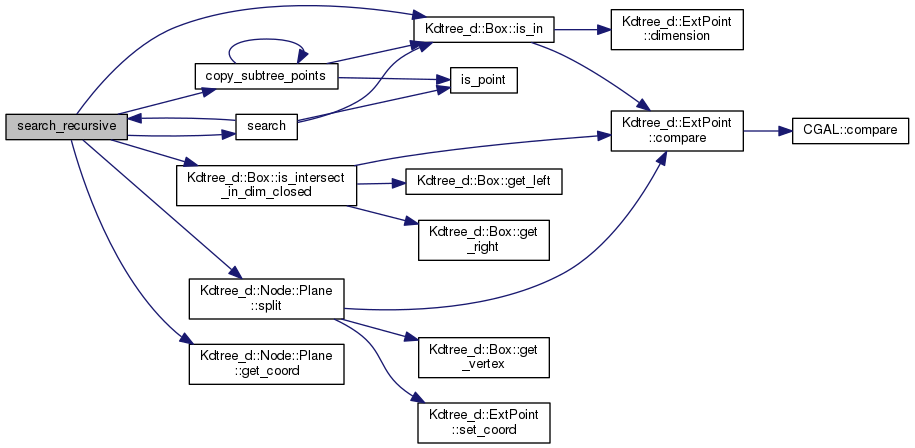
| static void | search_recursive (back_iter &result, Node *node, const Box &rect, Box &_region, Plane &plane, bool f_split_plus) |
Public Attributes | |
| Plane | plane |
| Point * | pnt |
| Node * | left |
| Node * | right |
Definition at line 558 of file kdtree_d.h.
| typedef std::back_insert_iterator<List_points> back_iter |
Definition at line 697 of file kdtree_d.h.
| anonymous enum |
| Enumerator | |
|---|---|
| LEFT | |
| RIGHT | |
Definition at line 629 of file kdtree_d.h.
|
inline |
Definition at line 699 of file kdtree_d.h.
|
inline |
Definition at line 702 of file kdtree_d.h.
Definition at line 705 of file kdtree_d.h.
References Kdtree_d< Traits >::Node::copy_subtree_points(), Kdtree_d< Traits >::Box::is_in(), Kdtree_d< Traits >::Node::is_point(), Kdtree_d< Traits >::Node::left, Kdtree_d< Traits >::Node::pnt, and Kdtree_d< Traits >::Node::right.
Referenced by Kdtree_d< Traits >::Node::copy_subtree_points(), and Kdtree_d< Traits >::Node::search_recursive().


|
inline |
Definition at line 670 of file kdtree_d.h.
References Kdtree_d< Traits >::Node::Plane::dump(), Kdtree_d< Traits >::Node::dump(), Kdtree_d< Traits >::Node::is_point(), Kdtree_d< Traits >::Node::left, Kdtree_d< Traits >::Node::plane, and Kdtree_d< Traits >::Node::right.
Referenced by Kdtree_d< Traits >::Node::dump(), and Kdtree_d< Traits >::dump().
|
inline |
Definition at line 631 of file kdtree_d.h.
References Kdtree_d< Traits >::Node::LEFT, Kdtree_d< Traits >::Node::Plane::orient_half_space(), and Kdtree_d< Traits >::Node::plane.
Referenced by Kdtree_d< Traits >::Node::is_valid().


|
inline |
Definition at line 692 of file kdtree_d.h.
References Kdtree_d< Traits >::Node::left, and Kdtree_d< Traits >::Node::right.
Referenced by Kdtree_d< Traits >::Node::copy_subtree_points(), Kdtree_d< Traits >::Node::dump(), Kdtree_d< Traits >::Node::is_points_in_hs(), Kdtree_d< Traits >::Node::is_valid(), and Kdtree_d< Traits >::Node::search().
|
inline |
Definition at line 640 of file kdtree_d.h.
References Kdtree_d< Traits >::Node::Plane::is_in(), Kdtree_d< Traits >::Node::is_point(), Kdtree_d< Traits >::Node::is_points_in_hs(), Kdtree_d< Traits >::Node::left, and Kdtree_d< Traits >::Node::right.
Referenced by Kdtree_d< Traits >::Node::is_points_in_hs(), and Kdtree_d< Traits >::Node::is_valid().

|
inline |
Definition at line 654 of file kdtree_d.h.
References Kdtree_d< Traits >::Node::get_hs(), Kdtree_d< Traits >::Node::is_point(), Kdtree_d< Traits >::Node::is_points_in_hs(), Kdtree_d< Traits >::Node::left, Kdtree_d< Traits >::Node::LEFT, Kdtree_d< Traits >::Node::right, and Kdtree_d< Traits >::Node::RIGHT.
Referenced by Kdtree_d< Traits >::is_valid().

|
inline |
Definition at line 762 of file kdtree_d.h.
References Kdtree_d< Traits >::Box::is_in(), Kdtree_d< Traits >::Node::is_point(), Kdtree_d< Traits >::Node::left, Kdtree_d< Traits >::Node::plane, Kdtree_d< Traits >::Node::pnt, Kdtree_d< Traits >::Node::right, and Kdtree_d< Traits >::Node::search_recursive().
Referenced by Kdtree_d< Traits >::search(), and Kdtree_d< Traits >::Node::search_recursive().

|
inlinestatic |
Definition at line 719 of file kdtree_d.h.
References Kdtree_d< Traits >::Node::copy_subtree_points(), Kdtree_d< Traits >::Node::Plane::get_coord(), Kdtree_d< Traits >::Box::is_in(), Kdtree_d< Traits >::Box::is_intersect_in_dim_closed(), Kdtree_d< Traits >::Node::search(), and Kdtree_d< Traits >::Node::Plane::split().
Referenced by Kdtree_d< Traits >::Node::search().

| Node* left |
Definition at line 627 of file kdtree_d.h.
Referenced by Kdtree_d< Traits >::build_r(), Kdtree_d< Traits >::Node::copy_subtree_points(), Kdtree_d< Traits >::Node::dump(), Kdtree_d< Traits >::Node::is_point(), Kdtree_d< Traits >::Node::is_points_in_hs(), Kdtree_d< Traits >::Node::is_valid(), and Kdtree_d< Traits >::Node::search().
| Plane plane |
Definition at line 624 of file kdtree_d.h.
Referenced by Kdtree_d< Traits >::build_r(), Kdtree_d< Traits >::Node::dump(), Kdtree_d< Traits >::Node::get_hs(), and Kdtree_d< Traits >::Node::search().
Definition at line 625 of file kdtree_d.h.
Referenced by Kdtree_d< Traits >::build_r(), Kdtree_d< Traits >::Node::copy_subtree_points(), and Kdtree_d< Traits >::Node::search().
| Node * right |
Definition at line 627 of file kdtree_d.h.
Referenced by Kdtree_d< Traits >::build_r(), Kdtree_d< Traits >::Node::copy_subtree_points(), Kdtree_d< Traits >::Node::dump(), Kdtree_d< Traits >::Node::is_point(), Kdtree_d< Traits >::Node::is_points_in_hs(), Kdtree_d< Traits >::Node::is_valid(), and Kdtree_d< Traits >::Node::search().
 1.8.5
1.8.5