 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
#include <interpolation.h>
Static Public Member Functions | |
| static points * | bilinear (points *pTarget, points *pSource, int rTargetVariable, int rSourceVariable) |
| Performs bilinear interpolation to find values from source mesh at the target points. More... | |
| static points * | bicubic (points *target, points *source, int var_target, int var_source) |
Static Private Member Functions | |
| static vector< int > | getCell (points *pTarget, points *pSource, int rTargetPointNumber, int rClosestPointNumber) |
| Get a points surrounding a target point in a mesh. More... | |
| static vector< int > | sortPoints (points *pSource, vector< int > rGridPoints) |
| Sort points (rGridPoints) from pSouce into a vector where 0 - Bottom Left 1 - Top Left 2 - Top Right 3 - Bottom Right. More... | |
Definition at line 25 of file interpolation.h.
|
static |
Performs bilinear interpolation to find values from source mesh at the target points.
Definition at line 156 of file interpolation.cpp.
References points::clone(), coord, points::get_closest(), points::get_num_indep_vars(), points::get_num_points(), points::get_num_vars(), points::get_point(), getCell(), i, nan(), points::set_point_val(), sortPoints(), and pnt::vals.
Referenced by compareFiles().


|
staticprivate |
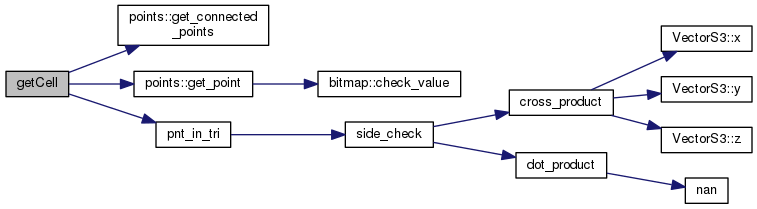
Get a points surrounding a target point in a mesh.
| pTarget | Target mesh |
| pSource | Source mesh |
| rTargetPoint | The number of the point on the target mesh that we'd like to find a cell for on the source mesh |
| rClosestPoint | The number of the point on the source mesh closest to the target point |
Definition at line 7 of file interpolation.cpp.
References points::get_connected_points(), points::get_point(), j, k, and pnt_in_tri().
Referenced by bilinear().

|
staticprivate |
Sort points (rGridPoints) from pSouce into a vector where 0 - Bottom Left 1 - Top Left 2 - Top Right 3 - Bottom Right.
| pSource | Dataset of the points to be sorted |
| rGridPoints | 4 points to be sorted as described above |
Definition at line 103 of file interpolation.cpp.
References points::get_point(), and pnt::vals.
Referenced by bilinear().


 1.8.5
1.8.5