 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
3D Geometric Metric Base Class More...
#include <Geometric_Metrics_3.h>
Public Member Functions | |
| Geo_Metric_Base_3 () | |
| virtual | ~Geo_Metric_Base_3 () |
| virtual void | initialize (Vector_3< double > n[], int type) |
| Initialize a 3D Geometric Metric by nodal coords and element type. More... | |
| virtual void | initialize (Element_node_enumerator &ene) |
| Initialize a 3D Geometric Metric by Element_node_enumerator. More... | |
| virtual double | maxValue () const |
| The maximum value for this metric. More... | |
| virtual double | minValue () const |
| The minimum value for this metric. More... | |
 Public Member Functions inherited from Metric Public Member Functions inherited from Metric | |
| Metric () | |
| virtual | ~Metric () |
| virtual void | compute (double atts[]) const =0 |
| Compute the value of this metric. More... | |
Protected Member Functions | |
| void | compute_angles (double &min, double &max) const |
| Compute min and max dihedral angles. More... | |
| void | compute_aspects (double &R, double &r, double &l) const |
| Compute circumradius, inradius, and shortest edge length. More... | |
Protected Attributes | |
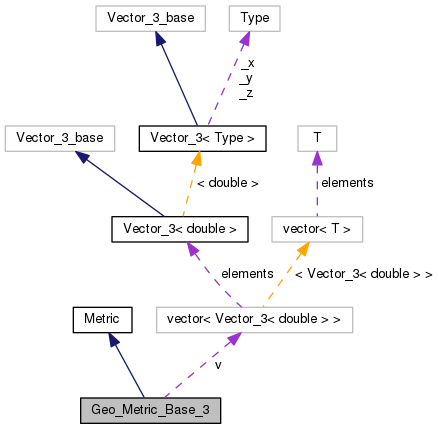
| std::vector< Vector_3< double > > | v |
| int | _type |
| const COM::Pane * | _ene_pane |
| int | _ene_i |
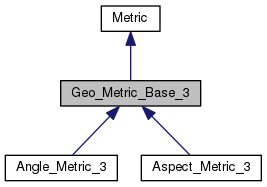
3D Geometric Metric Base Class
This class is the base class for the implementation of various 3D geometric element quality metrics.
Definition at line 43 of file Geometric_Metrics_3.h.
|
inline |
Definition at line 48 of file Geometric_Metrics_3.h.
|
inlinevirtual |
Definition at line 50 of file Geometric_Metrics_3.h.
|
protected |
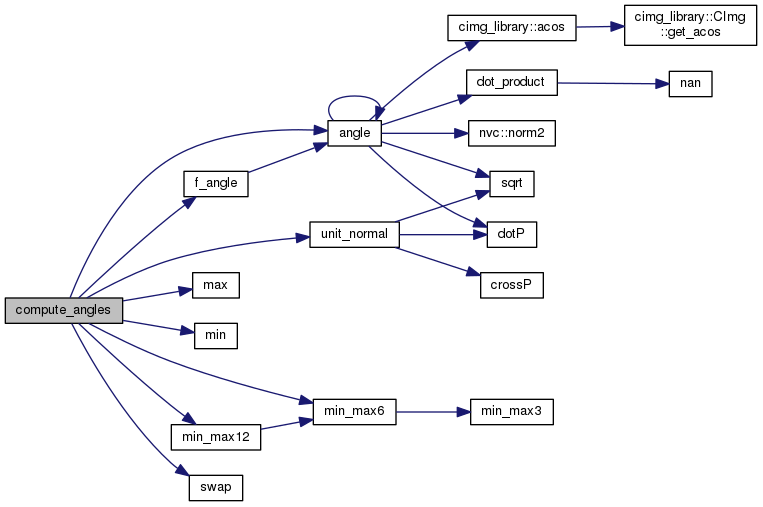
Compute min and max dihedral angles.
Definition at line 100 of file Geometric_Metrics_3.C.
References angle(), f_angle(), i, j, max(), min(), min_max12(), min_max6(), n, ni, nj, swap(), unit_normal(), and v.
|
protected |
Compute circumradius, inradius, and shortest edge length.
Definition at line 204 of file Geometric_Metrics_3.C.
References edge_length(), p1, sqrt(), tet_vol(), tri_area(), and v.
Referenced by Aspect_Metric_3::getAspects().


|
virtual |
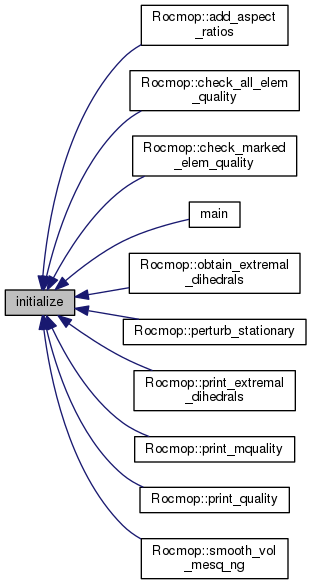
Initialize a 3D Geometric Metric by nodal coords and element type.
| n[] | Ordered set of nodal coordinates. |
| type | Element type: TET or HEX |
Implements Metric.
Definition at line 47 of file Geometric_Metrics_3.C.
References v.
Referenced by Rocmop::add_aspect_ratios(), Rocmop::check_all_elem_quality(), Rocmop::check_marked_elem_quality(), main(), Rocmop::obtain_extremal_dihedrals(), Rocmop::perturb_stationary(), Rocmop::print_extremal_dihedrals(), Rocmop::print_mquality(), Rocmop::print_quality(), and Rocmop::smooth_vol_mesq_ng().
|
virtual |
Initialize a 3D Geometric Metric by Element_node_enumerator.
| ene | Element_node_enumerator |
Implements Metric.
Definition at line 62 of file Geometric_Metrics_3.C.
References COM_assertion_msg, n, and v.
|
inlinevirtual |
The maximum value for this metric.
Implements Metric.
Reimplemented in Aspect_Metric_3, and Angle_Metric_3.
Definition at line 66 of file Geometric_Metrics_3.h.
|
inlinevirtual |
The minimum value for this metric.
Implements Metric.
Reimplemented in Aspect_Metric_3, and Angle_Metric_3.
Definition at line 69 of file Geometric_Metrics_3.h.
|
protected |
Definition at line 83 of file Geometric_Metrics_3.h.
|
protected |
Definition at line 82 of file Geometric_Metrics_3.h.
|
protected |
Definition at line 81 of file Geometric_Metrics_3.h.
|
protected |
Definition at line 80 of file Geometric_Metrics_3.h.
 1.8.5
1.8.5