 |
Rocstar
1.0
Rocstar multiphysics simulation application
|


|
|
Rocstar
1.0
Rocstar multiphysics simulation application
|
|
#include <set>#include <map>#include <cassert>#include <algorithm>#include <iostream>#include "kdtree_d.h"#include "Pane_connectivity.h"#include "Pane_boundary.h"
Go to the source code of this file.
Classes | |
| class | Point_3_ref |
| class | KD_tree_3 |
| class | KD_tree_pntref_3 |
Typedefs | |
| typedef std::pair< int, int > | pair_int |
| typedef std::pair< int, int > | Node_ID |
Functions | |
| static void | convert_nodelist (const std::vector< bool > &bs, std::vector< int > &nodes) |
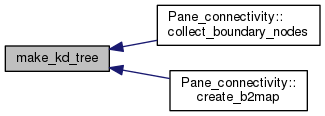
| static void | make_kd_tree (const std::vector< int > &nodes, const std::vector< Point_3< Real > > &pnts, std::vector< Point_3< Real > > &bbox, KD_tree_pntref_3 &ktree) |
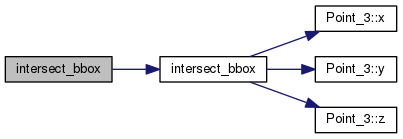
| static bool | intersect_bbox (const Point_3< Real > &bmin1, const Point_3< Real > &bmax1, const Point_3< Real > &bmin2, const Point_3< Real > &bmax2, Real eps) |
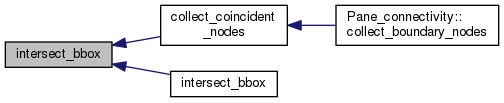
| static bool | intersect_bbox (const Point_3< Real > &bmin, const Point_3< Real > &bmax, const std::vector< Point_3< Real > > &bbox, Real tol) |
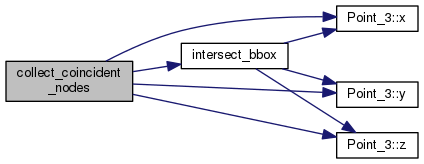
| static void | collect_coincident_nodes (const std::vector< int > &r_nodes, const std::vector< Point_3< Real > > &r_pnts, const std::vector< Point_3< Real > > &bbox, KD_tree_pntref_3 &ktree, double tol, std::vector< int > &nodes, std::vector< Point_3< Real > > &pnts) |
| typedef std::pair<int,int> Node_ID |
Definition at line 69 of file Pane_connectivity.C.
| typedef std::pair<int,int> pair_int |
Definition at line 68 of file Pane_connectivity.C.
|
static |
Definition at line 379 of file Pane_connectivity.C.
References i, intersect_bbox(), n, Point_3< T >::x(), Point_3< T >::y(), and Point_3< T >::z().
Referenced by Pane_connectivity::collect_boundary_nodes().

|
static |
Definition at line 87 of file Pane_connectivity.C.
Referenced by Pane_connectivity::get_local_boundary_nodes().

|
static |
Definition at line 355 of file Pane_connectivity.C.
References Point_3< T >::x(), Point_3< T >::y(), and Point_3< T >::z().
Referenced by collect_coincident_nodes(), and intersect_bbox().

|
static |
Definition at line 369 of file Pane_connectivity.C.
References i, intersect_bbox(), and n.
|
static |
Definition at line 334 of file Pane_connectivity.C.
Referenced by Pane_connectivity::collect_boundary_nodes(), and Pane_connectivity::create_b2map().
 1.8.5
1.8.5